
Quadruped Spider Robot Design and Gait Optimization
Bio-inspired quadruped robot with advanced locomotion capabilities, multiple gait patterns, and dynamic stability control for various terrain adaptations.
Read Full Article
Bio-inspired quadruped robot with advanced locomotion capabilities, multiple gait patterns, and dynamic stability control for various terrain adaptations.
Read Full Article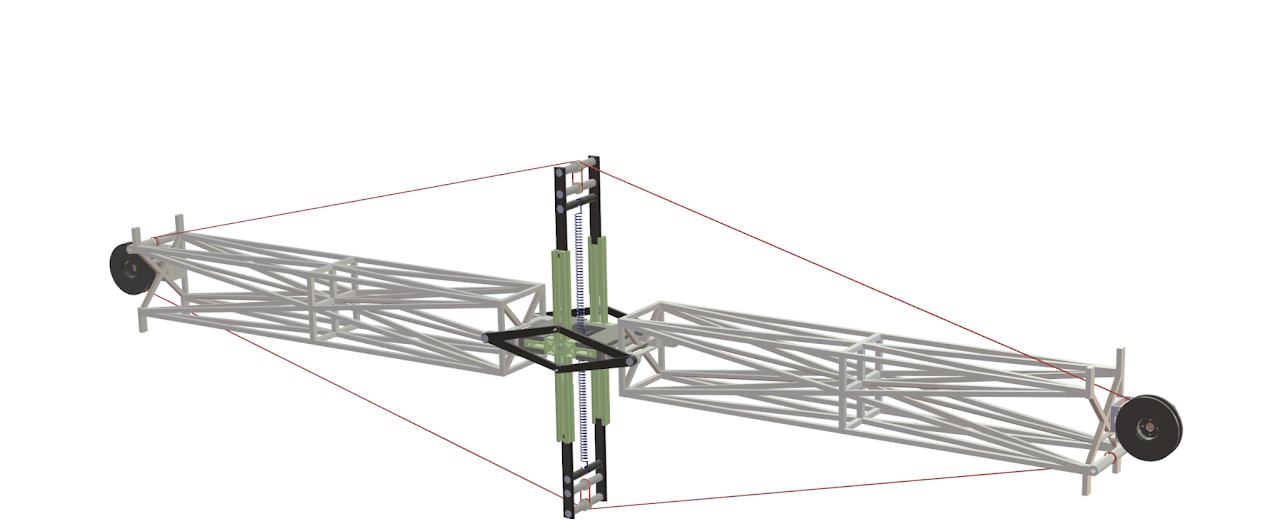
Developed a lever arm amplification joint to improve torque output for tendon-driven robotic arms in space applications. Optimized lightweight components and conducted kinematic analysis for precise control at Sun Yat-sen University.
Read Full Article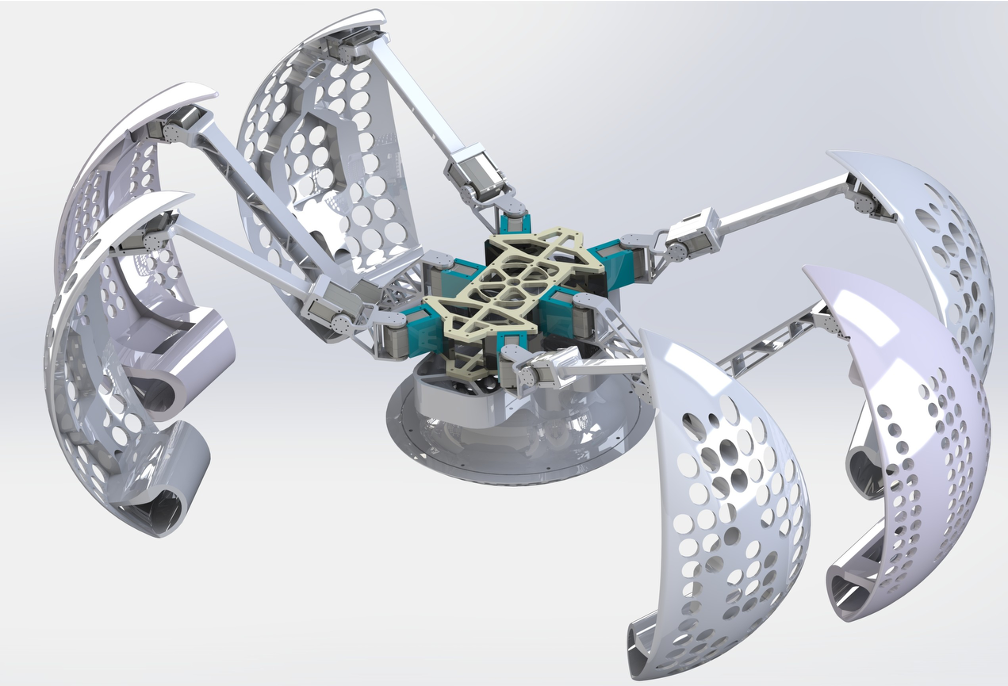
Versatile spherical robot for planetary exploration with multiple locomotion modes, autonomous navigation, and environmental sensing.
Read Full Article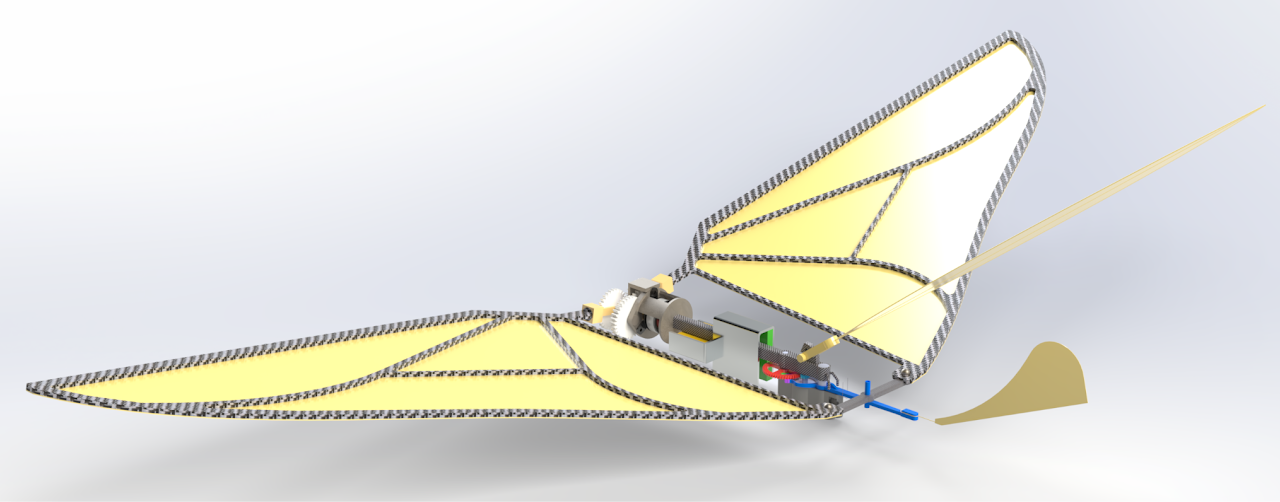
Bio-inspired flapping-wing robot mimicking avian flight mechanics with flexible wing structures and intelligent flight control systems.
Read Full Article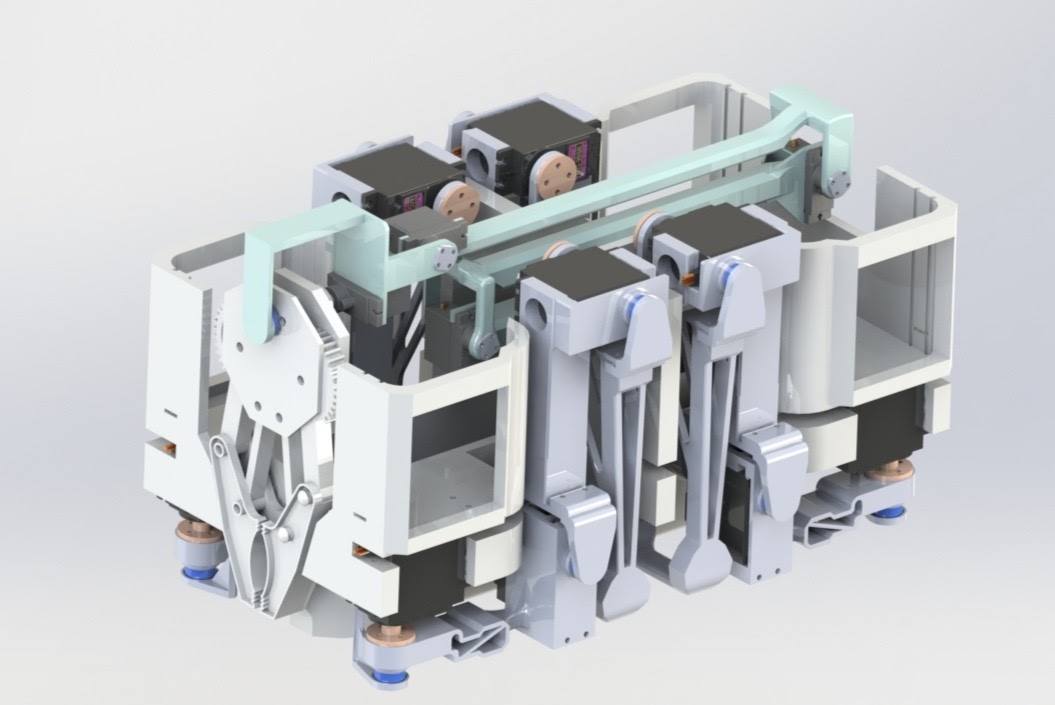
Compact foldable CubeSat robot with adhesive crawling capabilities for external space station operations and satellite servicing.
Read Full Article