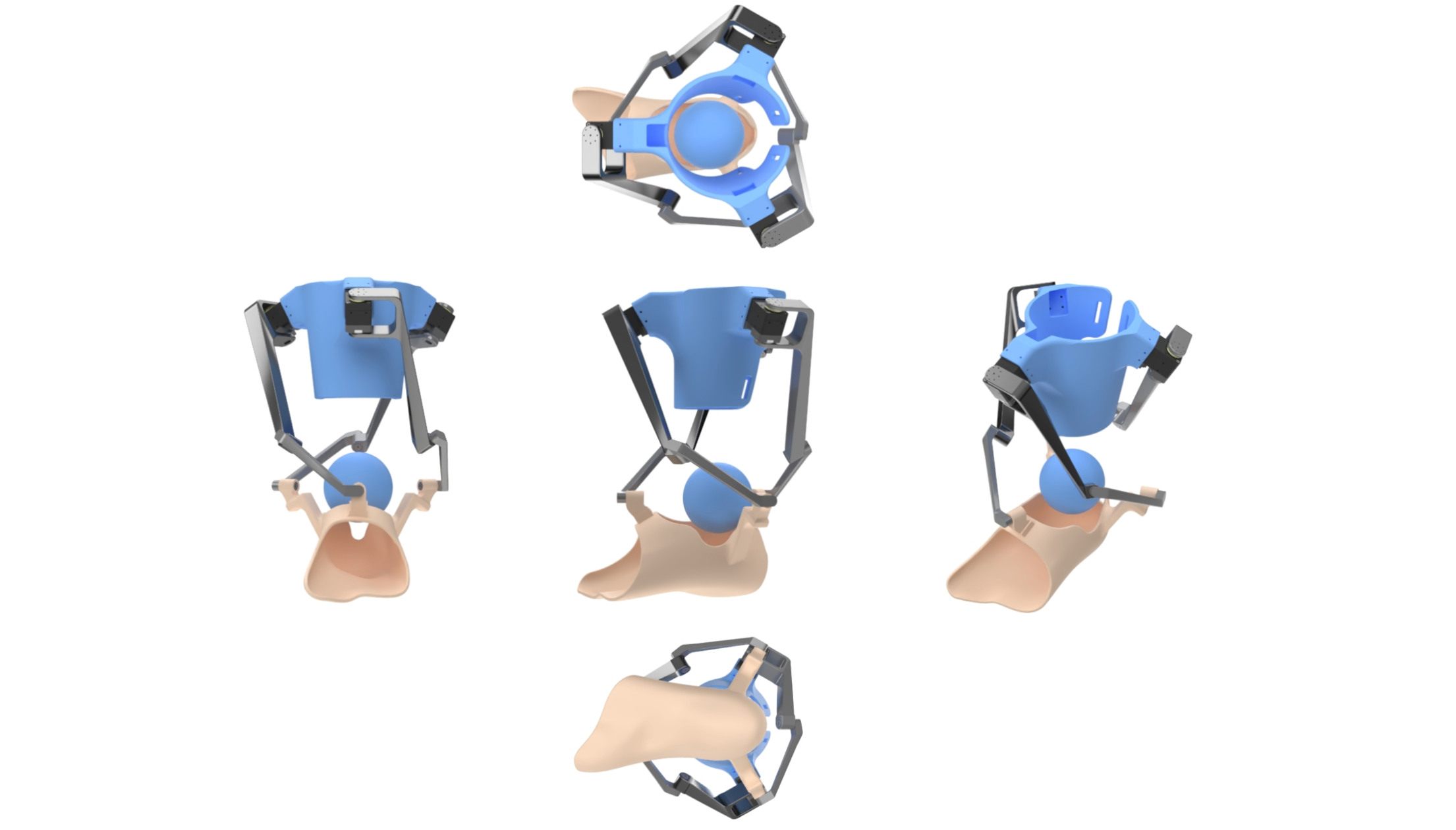
3-RRR Parallel Ankle Rehabilitation Robot
Design and control of a spherical parallel mechanism for comprehensive ankle joint therapy and motor recovery applications. Development of advanced control algorithms and kinematic modeling for precise rehabilitation assistance.
Read Article