Research Overview: This work presents the comprehensive development of a wearable ankle rehabilitation robot based on a 3-RRR spherical parallel mechanism, featuring a complete design-to-dynamics pipeline from structural design through kinematic modeling to Lagrangian-based dynamic modeling and control simulation.
Introduction
Ankle injuries are prevalent among athletes, postoperative patients, and individuals with neurological impairments. Effective rehabilitation is critical for restoring mobility, strength, and proprioception. However, conventional rehabilitation devices often provide limited degrees of freedom (DOFs), restricting natural joint movement and potentially prolonging recovery.
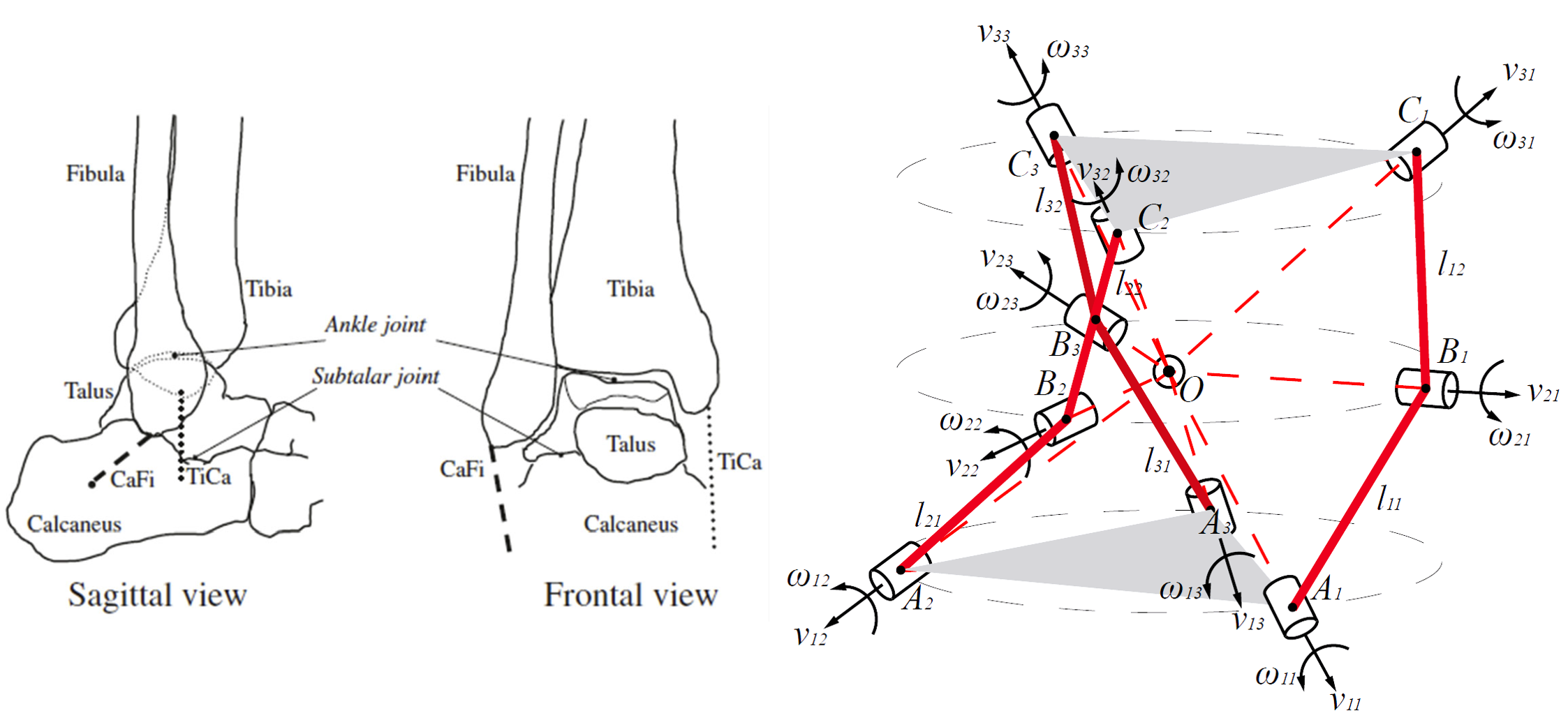
The human ankle can be biomechanically approximated as a spherical joint with three rotational DOFs: pitch (plantarflexion/dorsiflexion), roll (inversion/eversion), and yaw (internal/external rotation). Although the actual geometric model of the human body corresponds to more complex multi-degree-of-freedom movements, since the joint movements can all be contained within the same envelope surface, the ankle joint can be approximated using a spherical model. To replicate this natural movement, we propose a 3-RRR spherical parallel manipulator (SPM) as the core of a wearable ankle rehabilitation robot.
Mechanism Design and Engineering Considerations
The 3-RRR spherical parallel mechanism consists of three identical limbs, each with two revolute (R) joints connecting a fixed base to a moving platform. This configuration enables compact, symmetric structures capable of generating three rotational degrees of freedom about a common center of rotation.
Design Philosophy
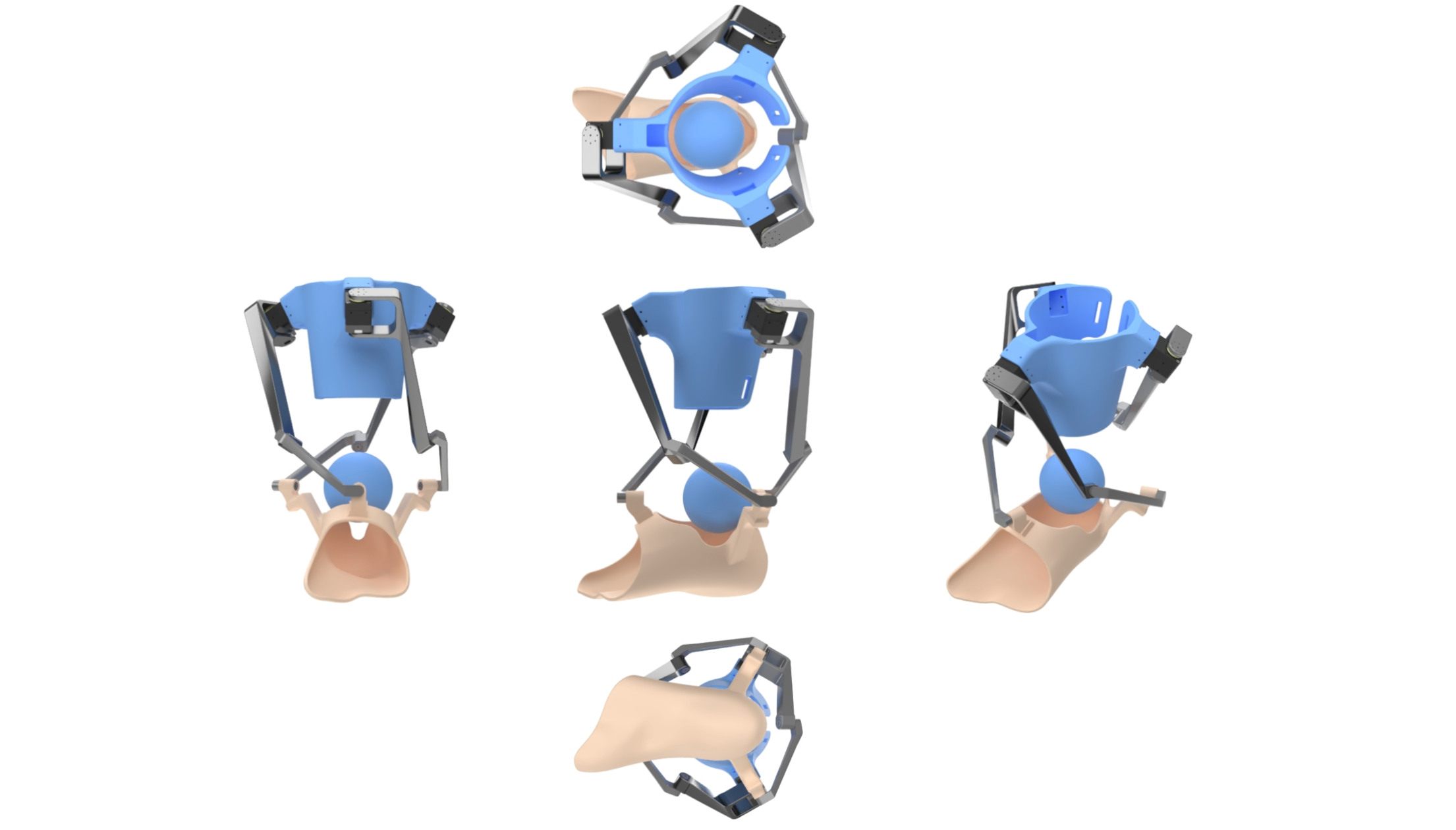
The device is designed for direct lower limb attachment, promoting daily use and better patient compliance. Key design considerations include:
Compact Base Ring: Custom-fitted with adjustable straps for secure, comfortable attachment to the lower leg.
Non-Interference Mechanisms: Low-profile limbs and joint housings minimize obstruction to nearby joints and ensure compatibility with footwear and braces.
Device Modularity: Interchangeable links and quick-release fasteners support adjustment across users and rehabilitation stages.
Kinematic Analysis and Motion Planning
The kinematic analysis establishes the mapping between platform pose and individual joint motions. We first define all symbols, then compare coordinate representations, derive frame transformations, and finally present inverse, forward, and velocity kinematics. These results underpin the dynamic modeling in the following section.
Geometric Framework
The 3-RRR mechanism consists of three identical kinematic chains, each connecting the base platform to the foot platform through actuated (\(A_i\)) and passive (\(B_i\)) joints. This configuration enables three rotational degrees of freedom while maintaining structural rigidity.
Kinematic Mapping
The system uses Euler angle transformations to map between platform orientation and joint angles:
where \(\alpha\), \(\beta\), and \(\gamma\) represent the ankle's roll, pitch, and yaw rotations.
Inverse and Forward Kinematics
The kinematics solution enables bidirectional mapping between:
- Inverse Kinematics: Given desired ankle pose → calculate required actuator angles \(\theta_i\)
- Forward Kinematics: Given actuator angles \(\theta_i\) → determine resulting ankle pose
The velocity relationship is governed by the system Jacobian:
where \(J_r\) relates joint velocities to platform angular velocity, critical for smooth motion control.
Dynamic Modeling and Control Framework
A comprehensive Lagrangian-based dynamic model was developed to enable accurate torque estimation and simulation analysis. The control framework incorporates PID controllers with tunable compliance characteristics to accommodate different rehabilitation requirements.
Dynamic Model
The system dynamics are described by the Lagrangian-based equation of motion:
where \(\mathbf{q} = [\theta_1, \theta_2, \theta_3]^T\) represents the actuator angles, \(M(\mathbf{q})\) is the mass matrix, \(C(\mathbf{q},\dot{\mathbf{q}})\) captures Coriolis effects, and \(\boldsymbol{\tau}\) are the applied torques.
Control Framework
The system employs independent PID controllers for each rotational degree of freedom (roll, pitch, yaw), enabling precise motion tracking and adjustable compliance characteristics.
Each axis follows the control law:
where \(e_i = q_{i,\text{ref}} - q_i\) is the tracking error for each axis.
Adaptive Compliance
The controller gains can be tuned to provide different compliance behaviors:
- Soft Assistance: Lower gains for gentle, compliant support during early rehabilitation
- Precise Control: Higher gains for accurate tracking during active therapy exercises
This adaptability allows the same device to accommodate different stages of patient recovery and therapy requirements.
Simulation Results and Validation
Preliminary simulations verified stable joint coordination and smooth motion tracking under representative rehabilitation trajectories. The system demonstrated robust performance across different compliance settings, enabling customization for individual patient needs.
Key Finding: Although the 3-RRR SPM is mechanically rigid, tuning feedback gains effectively modulates its compliance characteristics, allowing the same device to provide both gentle assistance and precise control depending on rehabilitation requirements.
Clinical Applications and Therapeutic Benefits
The 3-RRR parallel ankle rehabilitation robot addresses several limitations of conventional rehabilitation devices:
Multi-DOF Natural Movement
Unlike traditional single-axis devices, the system enables simultaneous pitch, roll, and yaw motions that closely replicate natural ankle biomechanics, promoting more effective rehabilitation outcomes.
Personalized Therapy Protocols
Adjustable compliance characteristics allow clinicians to customize therapy intensity and assistance levels based on individual patient progress and specific rehabilitation goals.
Wearable Form Factor
The compact, lightweight design promotes patient compliance and enables both clinical and home-based rehabilitation scenarios, extending therapy accessibility.
Future Developments and Research Directions
Building on the established foundation, several advanced features are under development:
Adaptive Control Framework
Integration of in-shoe IMU and plantar-pressure sensing with real-time model personalization will enable dynamic adaptation to individual patient biomechanics and progress.
Gait-Phase Integration
A fuzzy-logic impedance controller will operate around dynamically estimated joint axes and switch modes based on gait phase, enabling smooth transitions from static range-of-motion training to gait-timed assistance.
Enhanced Biomechanical Modeling
Future design iterations will incorporate a dual-axis, non-concentric ankle model to better match human biomechanics and improve ergonomic comfort, moving beyond the current single concentric center of rotation assumption.
Broader Impact and Applications
Beyond clinical rehabilitation, this platform can be reconfigured as an assistive walking or running device for individuals with neuromuscular impairments, providing real-time balance correction and dynamic support to enhance mobility and quality of life.
Research Impact: This work establishes a foundational platform for intelligent, personalized ankle rehabilitation, enabling both static training and potential extension to gait-phase-timed assistance while demonstrating how parallel mechanism design can be optimized for wearable therapeutic applications.
Conclusion
This research presents a comprehensive design-to-dynamics workflow for a wearable 3-RRR ankle rehabilitation robot, from portable mechanical design to kinematic and dynamic modeling and simulation-based control. The system successfully demonstrates how parallel mechanism principles can be adapted for wearable therapeutic applications while maintaining the precision and control characteristics necessary for effective rehabilitation.
The validated platform provides a solid foundation for advancing personalized ankle rehabilitation technology, with ongoing development focused on adaptive control, gait integration, and enhanced biomechanical modeling to further improve therapeutic outcomes and patient experience.