Research Project: As a member of the research team at Sun Yat-sen University, under the guidance of Prof. Zhenbo Lu, our team developed a lightweight and efficient flapping-wing robot inspired by small birds. The design integrates principles of bionics with advanced control systems to achieve stable and controlled flight.
Project Overview
Institution: Sun Yat-sen University, ShenZhen, CN
Advisor: Prof. Zhenbo Lu
Duration: September 2022 - December 2023
Research Type: Team Research Project
Team Role: Core Research Member
Technical Design
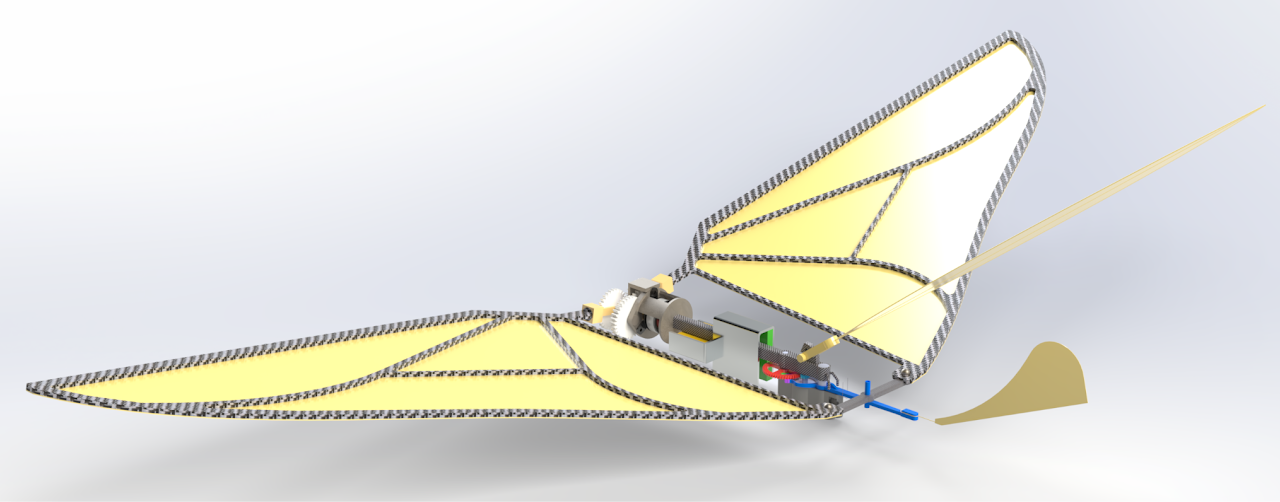
The flapping-wing robot features several innovative design elements:
- Lightweight and foldable structure optimized for efficient flight
- Bio-inspired wing mechanism mimicking avian flight patterns
- Low-noise operation through careful mechanical design
- Integrated sensors for flight stability and control
Research Methodology
The development process followed a systematic approach:
- Comprehensive study of bird flight mechanics and wing kinematics
- SOLIDWORKS-based mechanical design and optimization
- ANSYS simulation for structural and aerodynamic analysis
- Implementation of closed-loop control system for flight stability
Key Features
The project incorporates several advanced features:
- Biomimetic wing design for enhanced aerodynamic efficiency
- Lightweight materials selection for optimal power-to-weight ratio
- Integrated control system for stable flight operations
- Modular design allowing easy maintenance and modifications
Control System Implementation
The closed-loop control system ensures stable flight through:
- Real-time attitude and position sensing
- Dynamic flight path adjustment
- Automated stability control
- Adaptive response to environmental conditions
Project Outcomes
The research achieved several significant results:
- Successful development of a functional flapping-wing prototype
- Validation of bio-inspired design principles
- Implementation of effective flight control mechanisms
- Demonstration of stable hovering and forward flight capabilities
Future Development
Potential areas for future enhancement include:
- Further optimization of wing geometry and materials
- Enhanced control algorithms for complex maneuvers
- Integration of advanced navigation capabilities
- Development of autonomous operation features
Conclusion
This project successfully demonstrated the feasibility of bio-inspired flapping-wing robot design. The integration of lightweight structures, efficient mechanisms, and advanced control systems resulted in a functional prototype that effectively mimics bird flight characteristics while maintaining stable and controlled operation.