Project Leadership: Led a team of 5 in designing a spider-inspired CubeSat with foldable claws, mechanical legs, and detection modules for surface inspection, debris removal, and damage repair. The project was awarded 3rd prize in the IAF-CSA Space Universities CubeSat Challenge 2.0 for its innovative design and engineering solutions.
Project Overview
Institution: Sun Yat-sen University, ShenZhen, CN
Advisor: Prof. Jianing Wu
Duration: March 2022 - August 2023
Research Type: Team Research Project

Technical Design
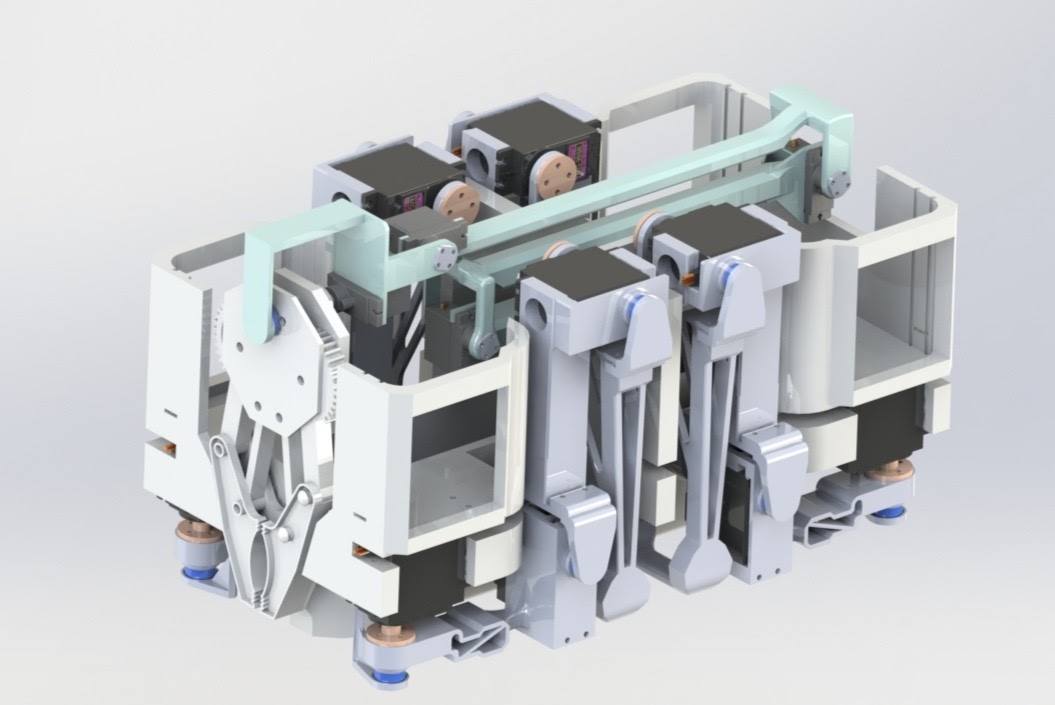
The CubeSat features several innovative design elements:
- Spider-inspired foldable claws and mechanical legs for versatile movement
- Detection modules for surface inspection, debris removal, and damage repair
- Electrostatic adsorption system for secure attachment in microgravity
- Lightweight and modular structure for easy deployment and maintenance
Research Methodology
The development process included:
- Mechanical design and optimization using SOLIDWORKS
- Simulation and analysis of structural performance
- Exploration of electrostatic adhesion techniques for space environments
- Iterative prototyping and testing for reliability
Key Achievements
- 3rd prize in the IAF-CSA Space Universities CubeSat Challenge 2.0
- Successful demonstration of foldable, adhesive crawling mechanism
- Innovative integration of detection and repair modules
- Optimized design for space station surface operations
Conclusion
This project demonstrated the feasibility and effectiveness of a foldable, adhesive crawling CubeSat for space station operations. The innovative mechanical design, combined with advanced adhesion and detection capabilities, provides a robust solution for inspection, debris removal, and repair tasks in space environments.