Research Project: Under the guidance of Prof. Jinxiu Zhang, this project developed an innovative spherical robot design for planetary surface exploration. The robot incorporates biomimetic principles and features multiple motion modes to enhance its adaptability and effectiveness in navigating various extraterrestrial terrains.
Project Overview
Institution: Sun Yat-sen University, ShenZhen, CN
Advisor: Prof. Jinxiu Zhang
Duration: September 2023 - December 2023
Research Type: Independent Research Project
This research project explores the development of a novel spherical robot designed specifically for planetary surface exploration. The robot incorporates biomimetic principles and features multiple motion modes to enhance its adaptability and effectiveness in navigating challenging extraterrestrial terrains.
Research Background
Planetary exploration robots face significant challenges in navigating diverse and unpredictable terrains on extraterrestrial surfaces. Traditional wheeled or tracked robots often struggle with obstacles and varying surface conditions. This project addresses these challenges by developing a spherical robot with enhanced mobility capabilities inspired by biological systems, specifically designed for exploration missions on planetary surfaces.
Integration of rolling, jumping, and transformation capabilities for planetary terrain navigation
Structure and movement patterns optimized for extraterrestrial surface conditions
Design optimized for operation in planetary environments
Novel mechanisms for terrain-adaptive locomotion
Technical Design
The spherical robot features an innovative mechanical design specifically optimized for planetary surface exploration:
- Rolling motion system for efficient traversal of flat and moderately rough terrains
- Jumping mechanism for overcoming obstacles and navigating challenging surface features
- Adaptive transformation capabilities for different planetary surface conditions
- Integrated environmental sensing for terrain analysis
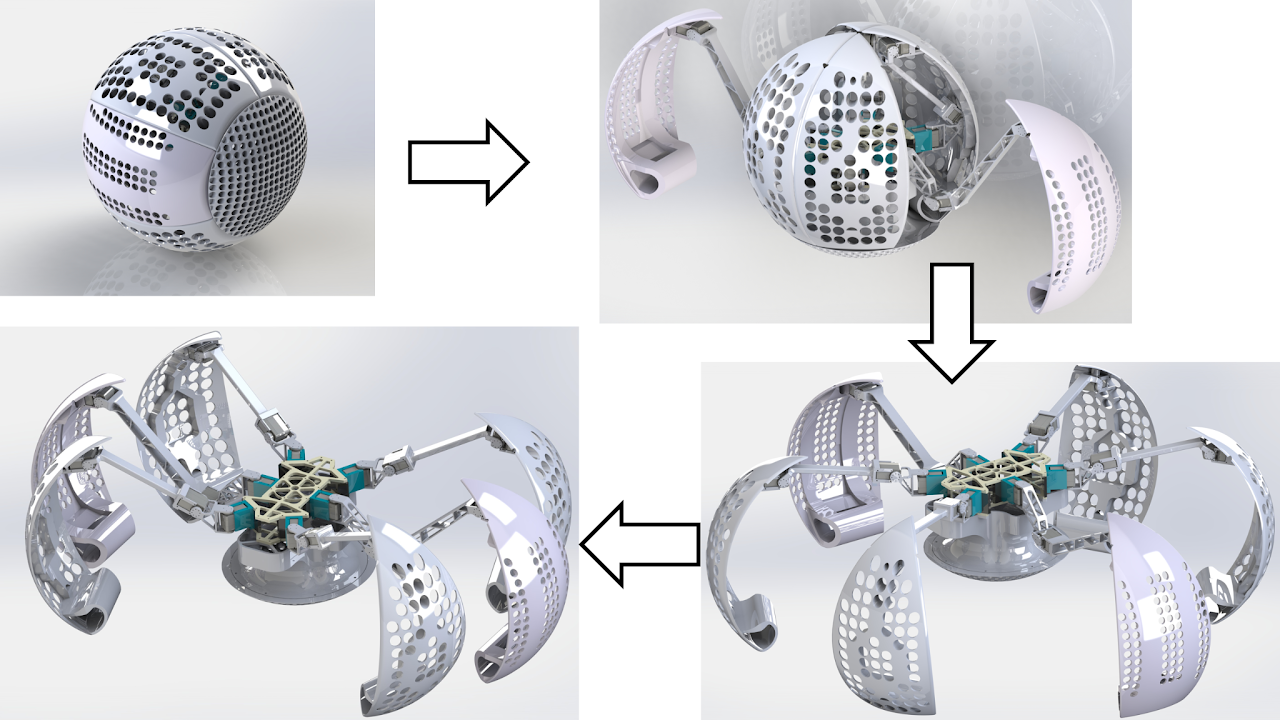
Key Innovations
The project introduces several innovative features for planetary exploration:
- Multi-modal locomotion system adapted to various planetary surface conditions
- Biomimetic movement strategies for efficient terrain navigation
- Robust mechanical design for operation in extraterrestrial environments
- Terrain-adaptive control algorithms for autonomous operation
Research Methodology
The development process followed a systematic approach focused on planetary exploration requirements:
- Analysis of planetary surface conditions and exploration challenges
- Mechanical design optimization for extraterrestrial environments
- Simulation of robot performance in various terrain conditions
- Prototype testing and validation
Project Outcomes
The research project achieved several significant results:
- Successful development of a multi-modal spherical robot prototype
- Validation of the robot's mobility capabilities on simulated planetary terrains
- Implementation of terrain-adaptive control strategies
- Demonstration of the robot's potential for planetary exploration missions
Future Development
While this project has concluded, several promising directions for future development were identified:
- Further optimization of the locomotion mechanisms for specific planetary environments
- Enhancement of autonomous navigation capabilities
- Integration of specialized scientific instruments for planetary research
- Testing in more realistic planetary analog environments
Conclusion
This research project successfully demonstrated the potential of biomimetic spherical robots for planetary surface exploration. The multi-modal design approach offers promising solutions to the challenges of navigating diverse extraterrestrial terrains, contributing to the advancement of planetary exploration robotics.