Research Progress: This post presents our DNA-inspired self-reproducing robot research progress. Having successfully completed Stage I (concept construction and geometric transformation studies), we are now actively developing physical prototypes in Stage II, transitioning from theoretical concepts to tangible robotic systems.
Introduction
The quest to create machines capable of self-reproduction has long been a cornerstone of advanced robotics research. Drawing inspiration from the elegant simplicity and reliability of biological DNA replication, this research presents the first stage of a groundbreaking approach to autonomous robotic self-reproduction that mimics the fundamental principles of genetic material duplication.
Our DNA-inspired self-reproducing robot research follows a systematic multi-stage approach, progressing from geometric concept construction through 3D-to-2D transformations toward full autonomous replication capabilities. Having completed Stage I, we present the foundational framework that will guide subsequent development stages toward creating truly self-reproducing robotic systems.
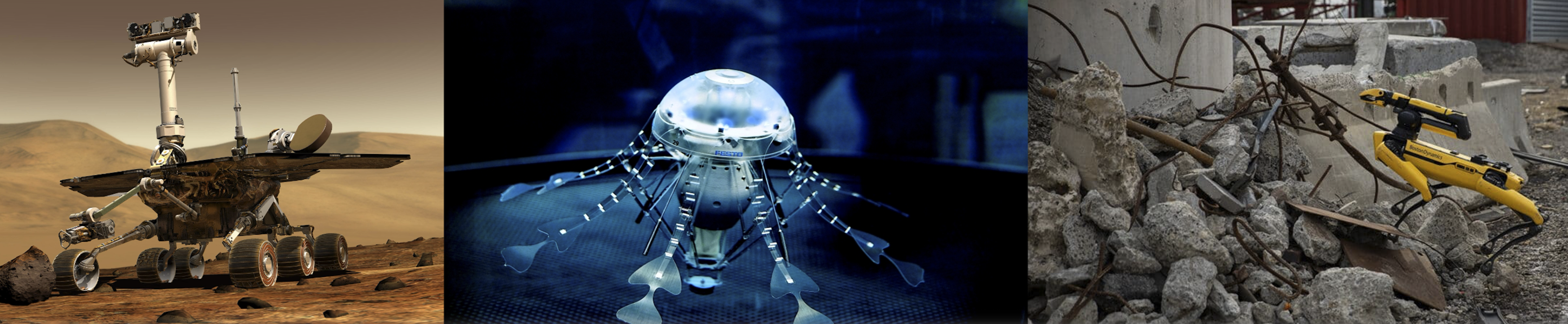
Target Applications: Extreme Environment Deployment
The robust design of our DNA-inspired robots makes them ideal for deployment in extreme environments where human intervention is impossible or dangerous. From deep space missions to hazardous industrial environments, these robots can establish self-sustaining colonies through autonomous reproduction and adaptation.
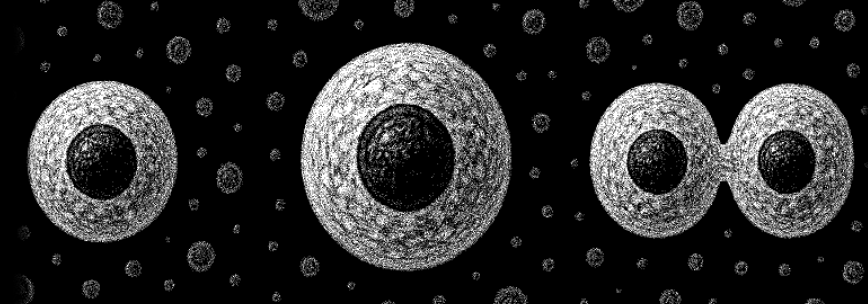
Biological Inspiration: From Cell Division to Digital Genesis
The remarkable process of cell division serves as the primary biological inspiration for our self-reproducing robotic system. During mitosis, a single cell precisely duplicates its genetic material and cellular components before dividing into two identical daughter cells. This fundamental biological mechanism demonstrates nature's mastery of self-replication with extraordinary fidelity and efficiency.
Our robotic design directly translates the principles observed in cell division into mechanical systems. Just as cellular organelles coordinate to ensure proper chromosome separation and cytoplasm distribution, our modular robotic components employ sophisticated magnetic coupling and intelligent assembly algorithms to achieve precise replication. The cellular process of growth, duplication, and division provides the conceptual framework for our digital genesis approach.
Modular Architecture Design
The core of our self-reproducing robot lies in its modular architecture, where each module functions as both a structural component and an information carrier. This design philosophy mirrors the dual role of DNA as both genetic information storage and the blueprint for cellular machinery.
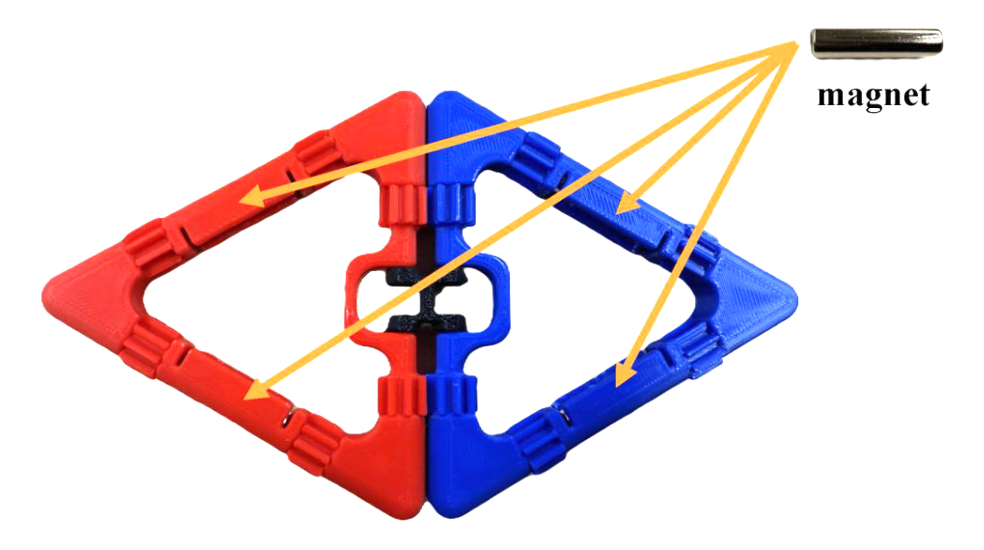
Connection and Disconnection Mechanisms
The ability to form and break connections autonomously is crucial for self-reproduction. Our modules feature sophisticated magnetic coupling systems that can establish strong bonds during assembly while allowing controlled disconnection when reconfiguration is required.
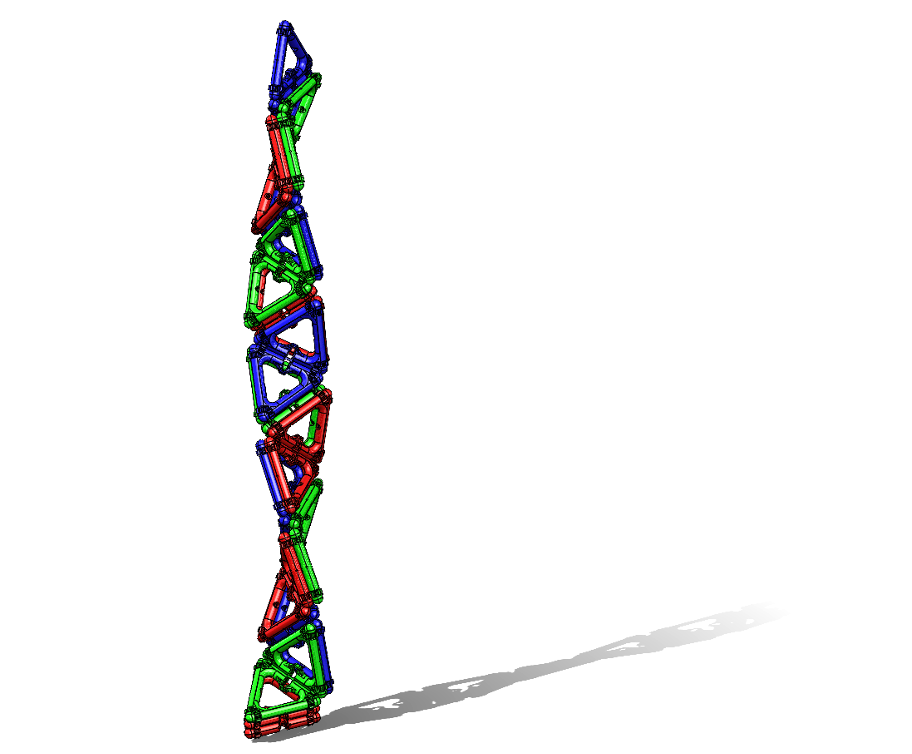
Transformation and Mobility - Stage I Achievement
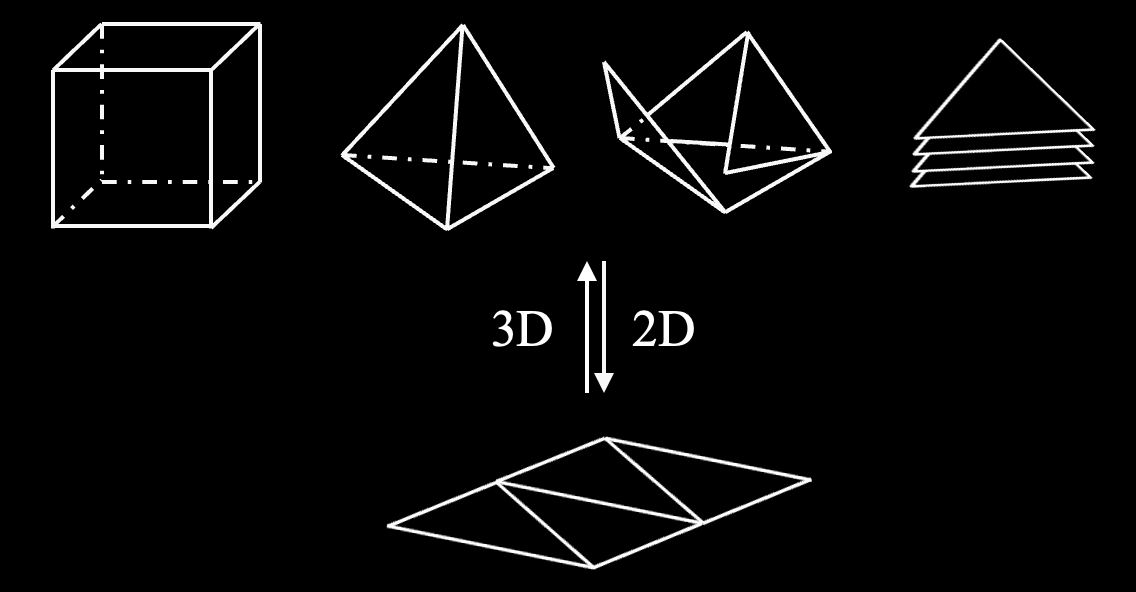
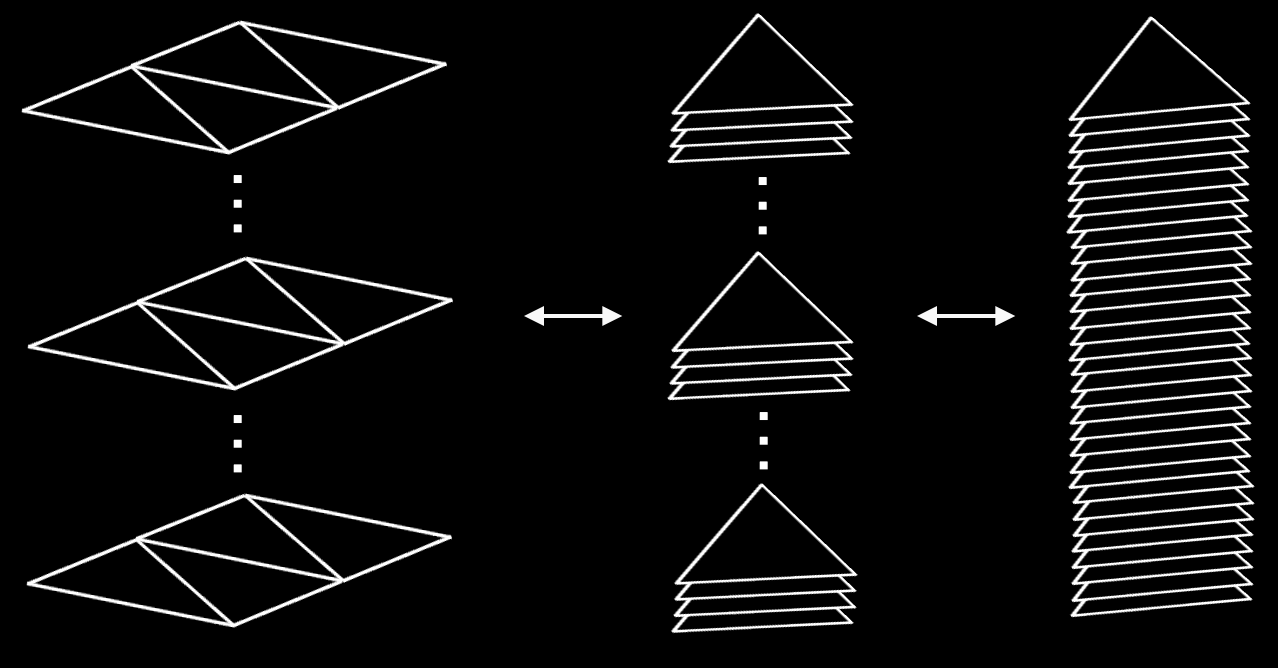
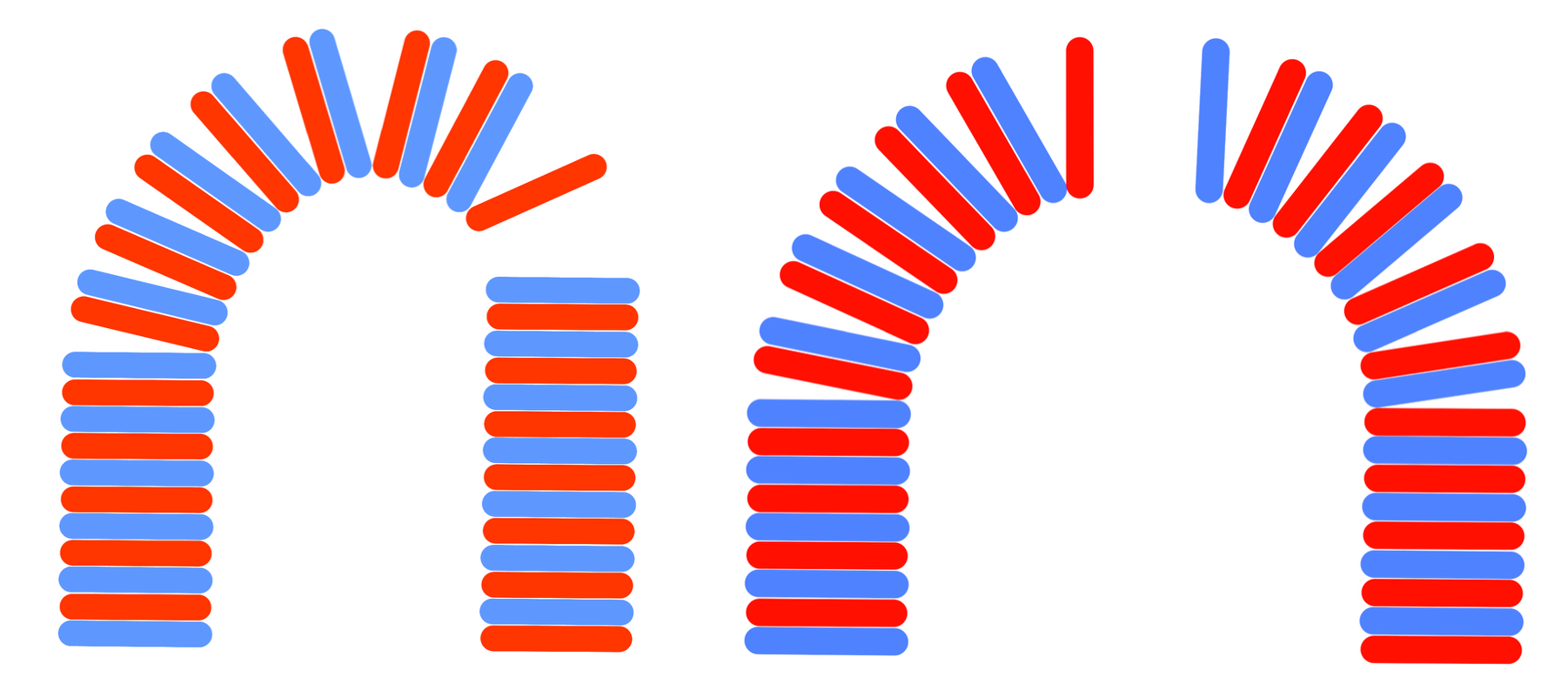
The cornerstone achievement of Stage I is the successful conceptualization and validation of geometric transformations from complex 3D structures to compact 2D configurations. This fundamental capability enables our DNA-inspired robot to transition between operational and storage states, mimicking the way DNA unfolds and refolds during replication processes.
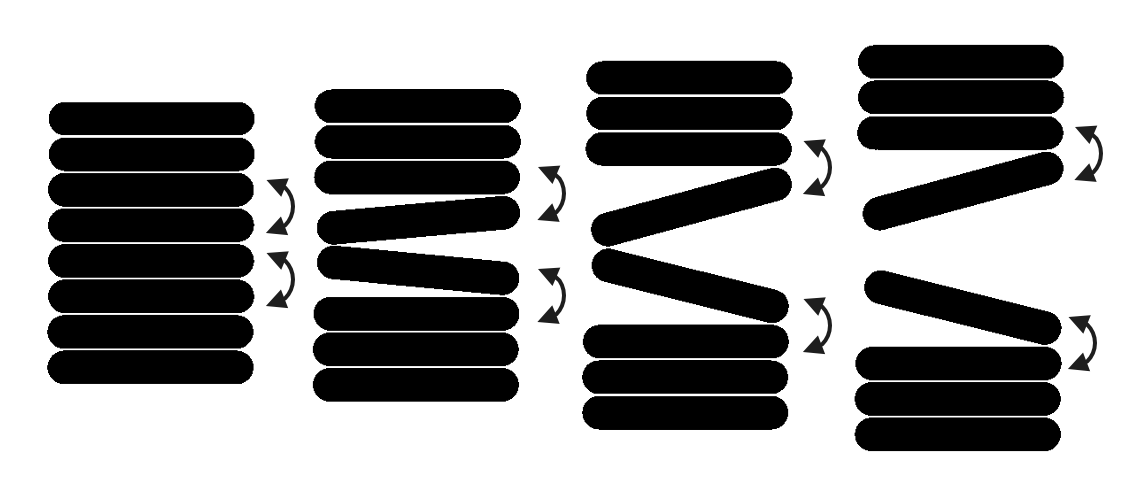
Folding Capabilities
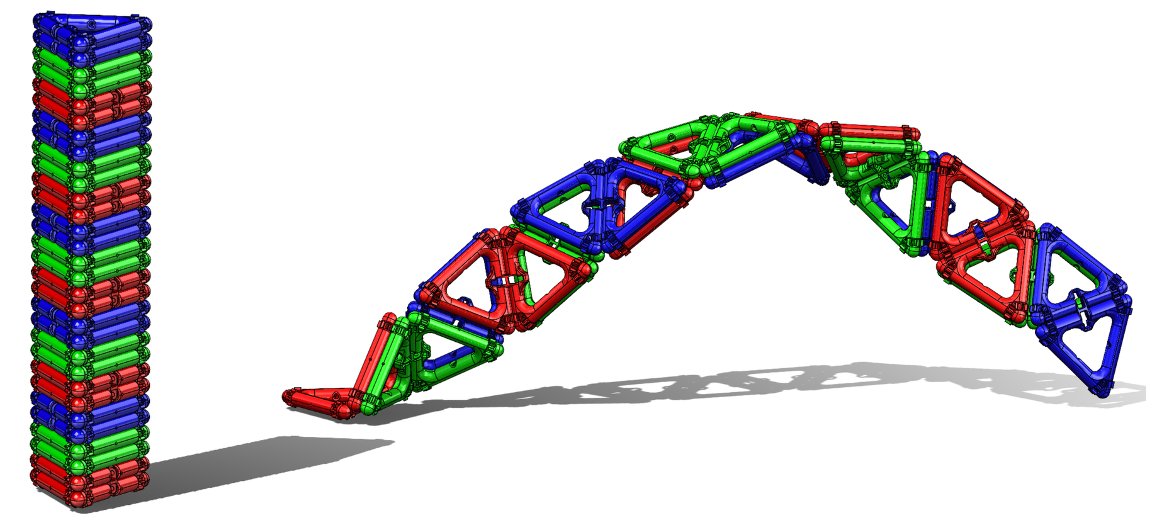
The folding mechanism allows the robot to achieve compact storage configurations and deploy into working configurations as needed. This capability is essential for efficient material usage during the reproduction process.
Advanced Mobility and Manipulation
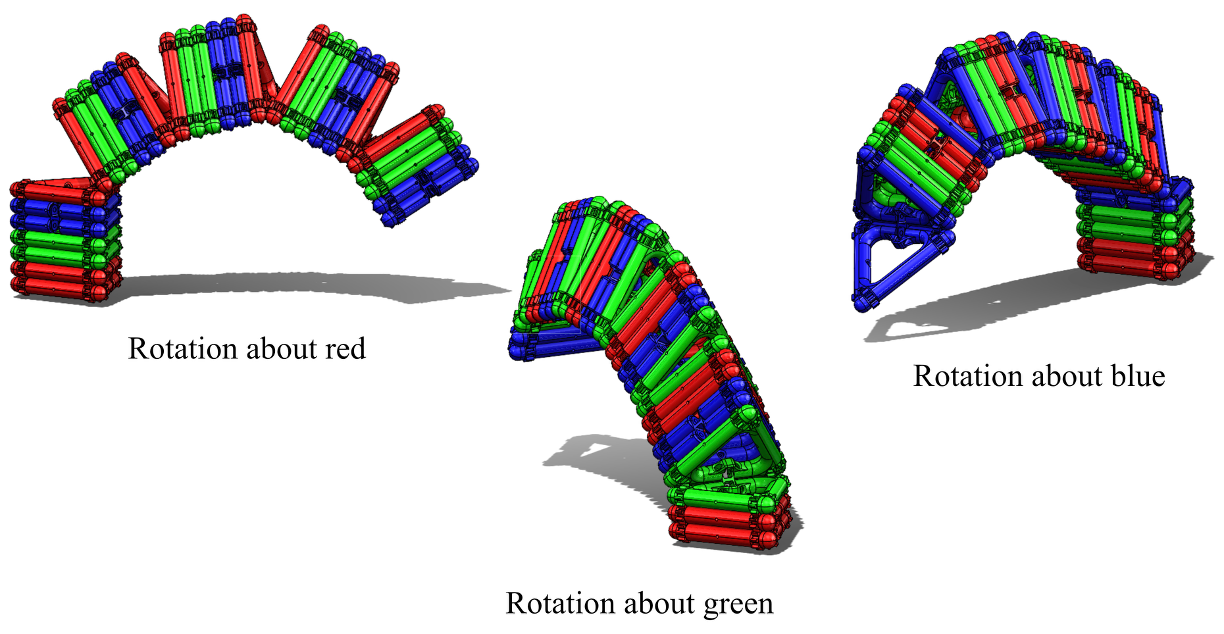
The self-reproducing robot exhibits remarkable mobility through its six-degree-of-freedom (6DOF) actuation system, allowing precise manipulation of components during the assembly process.
Multi-Directional Rotation
The robot's ability to rotate about different axes enables complex assembly sequences and allows access to all connection points during the reproduction process.

Self-Reproduction Process
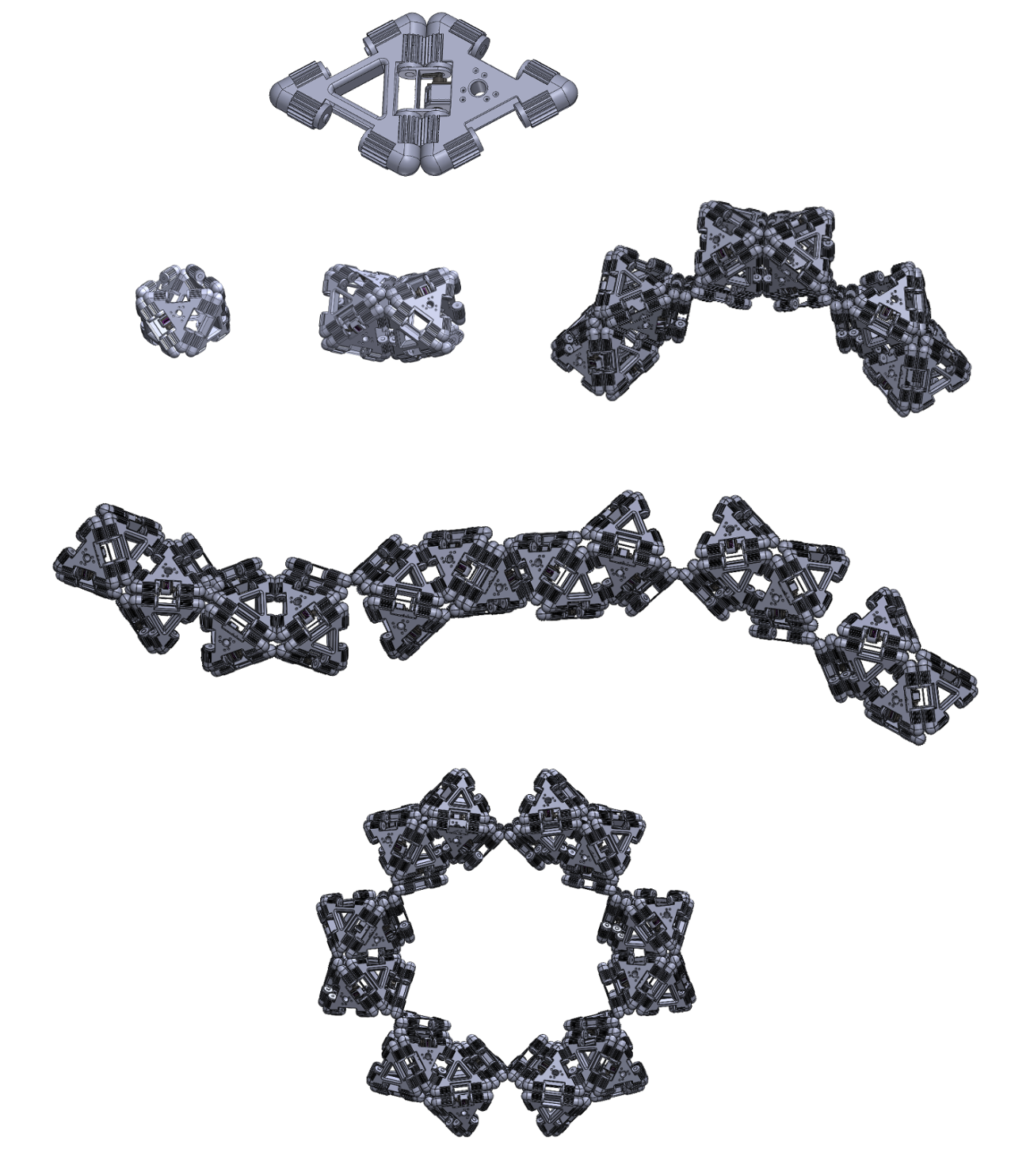
The core concept of our DNA-inspired system demonstrates a sophisticated self-reproduction process that mirrors biological cell division. This process involves two distinct stages: an intermediate state where the original robot expands while constructing a new individual, and a final state where a complete mirrored copy has been successfully generated.
Intermediate State
During the intermediate stage, the original robot actively absorbs available modules from the environment, simultaneously expanding its own structure while initiating the construction of a new robotic entity. This stage demonstrates the system's ability to gather resources and manage dual construction processes - self-enhancement and offspring creation.
Final Reproducing State
The final state represents the successful completion of the self-reproduction cycle. The original robot has generated a complete mirrored copy of itself, each consisting of precisely 10 modules. This achievement demonstrates the system's capability to maintain structural integrity while creating functionally identical offspring.
Structural Diversity and Adaptability
Beyond the fundamental self-reproduction process, our DNA-inspired system demonstrates remarkable versatility in assembling modules into various structural configurations, showing adaptability to different operational requirements.

Evolutionary Capabilities
Beyond simple replication, our system demonstrates evolutionary capabilities, allowing for gradual improvements and adaptations across generations. This evolutionary aspect mirrors the way biological systems adapt and improve over time.
Research Methodology & Development Pipeline
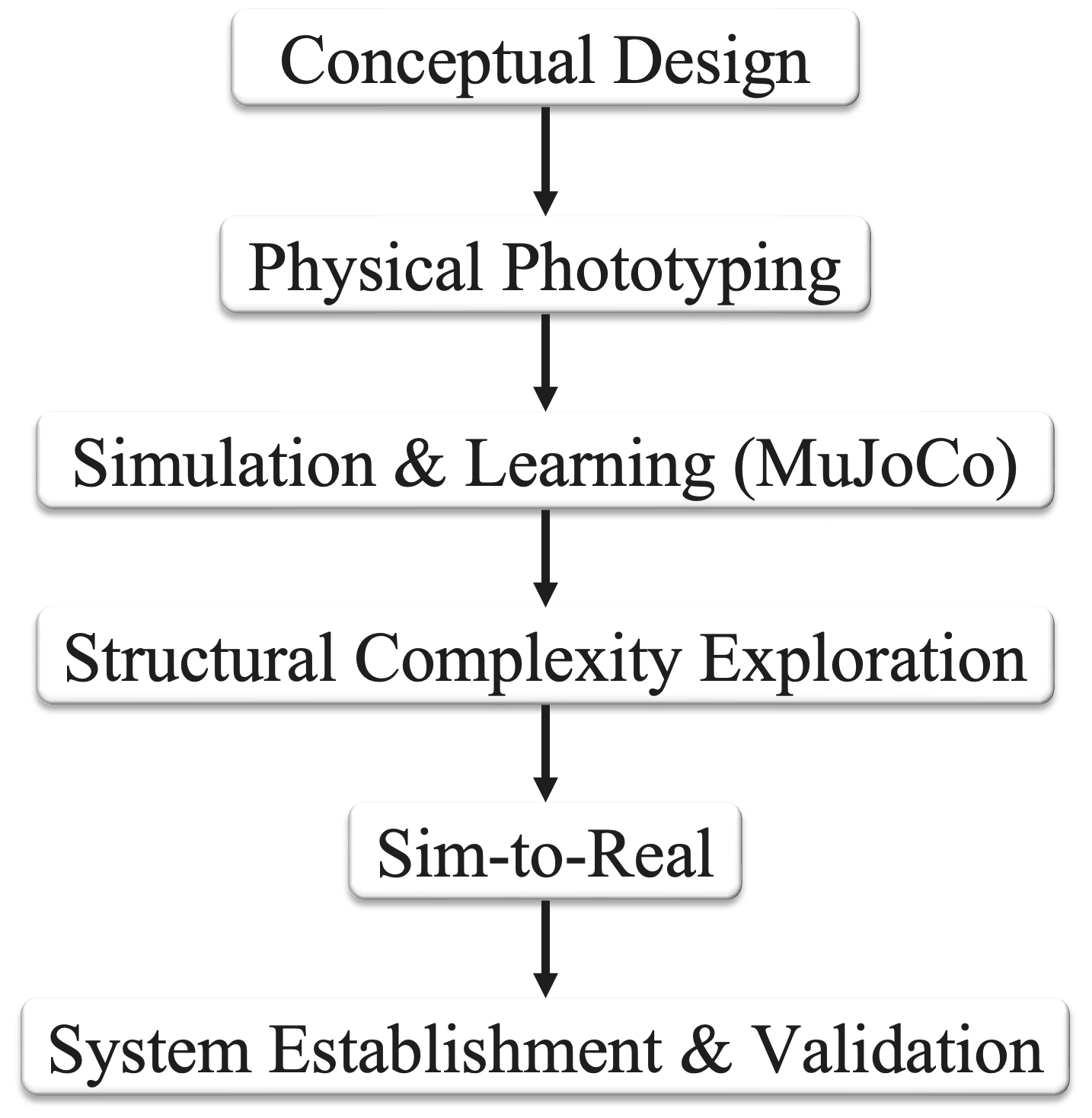
Our comprehensive research approach follows a systematic six-stage development pipeline, designed to progressively advance from theoretical concepts to real-world implementation. This methodology ensures rigorous validation at each stage while maintaining scientific rigor throughout the development process.
Current Progress: Conceptual Design Completed
We have successfully completed the Conceptual Design stage, which serves as the foundation for all subsequent research stages. This stage established the fundamental geometric transformation principles and theoretical framework that will guide the entire development process.
Research Pipeline Stages:
Stage 1 - Conceptual Design (✅ Completed): Fundamental geometric transformations, 3D-to-2D structural transitions, and theoretical framework establishment.
Stage 2 - Physical Prototyping (🔄 Next Stage): Development of physical modular components and validation of transformation mechanisms.
Stage 3 - Simulation & Learning (MuJoCo): Computational modeling, behavior simulation, and machine learning integration for autonomous assembly.
Stage 4 - Structural Complexity Exploration: Investigation of advanced configurations and adaptive structural variations.
Stage 5 - Sim-to-Real: Translation of simulation results to physical robotic systems with real-world validation.
Stage 6 - System Establishment & Validation: Complete system integration, performance evaluation, and comprehensive validation testing.
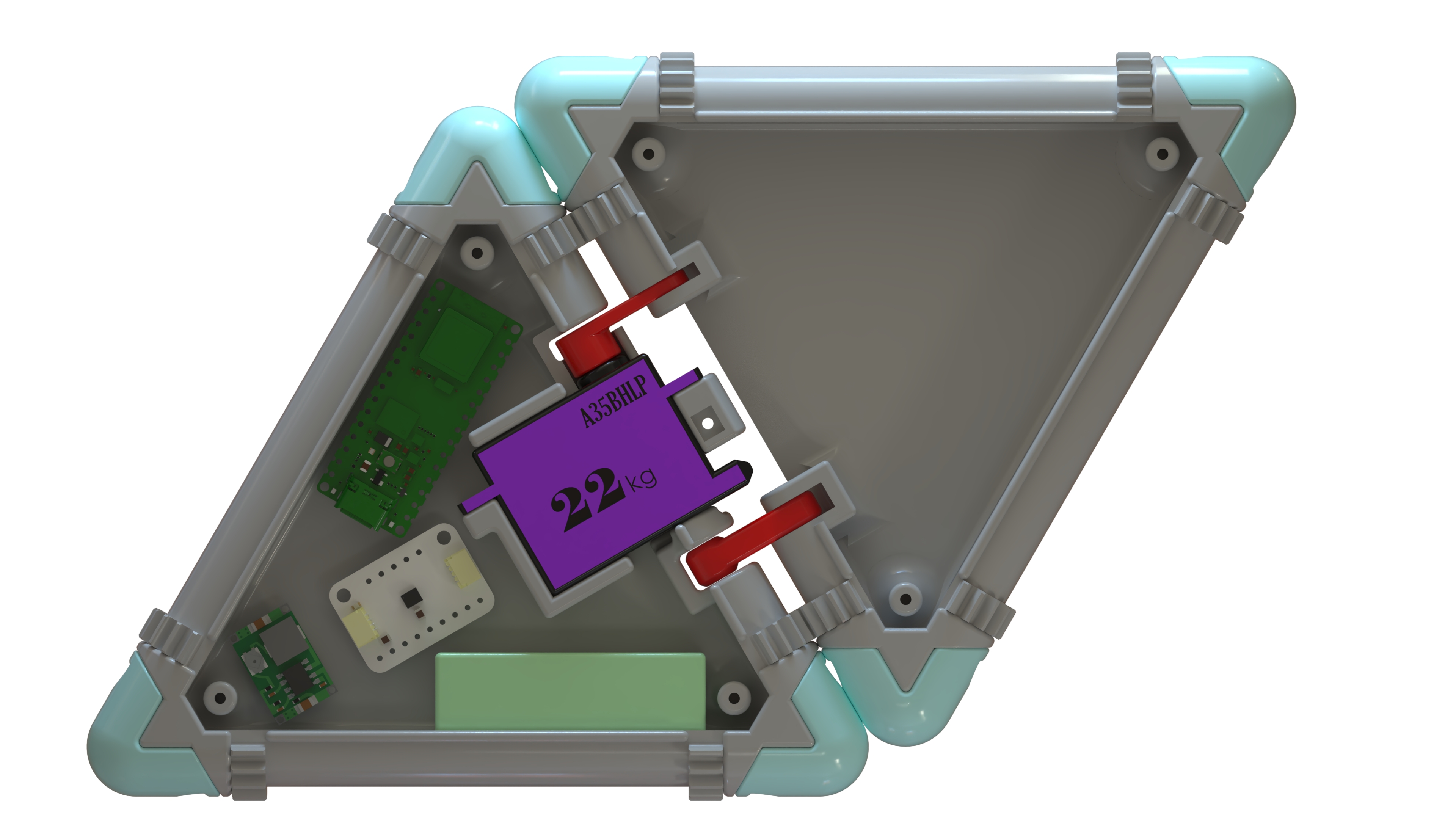
Stage II Progress: Physical Prototyping
Building upon the successful completion of Stage I, we have advanced into Stage II of our research, focusing on the physical realization of our DNA-inspired self-reproducing robot concepts. This stage marks a critical transition from theoretical design to tangible prototype development.
Current Stage II Activities
Our current efforts in Stage II are concentrated on:
3D Modeling and Design Refinement: Translating conceptual designs into detailed 3D models suitable for manufacturing and assembly.
Electronic Integration Planning: Identifying and specifying electronic components, sensors, and actuators required for autonomous operation.
Hardware Integration: Developing assembly protocols for integrating electronic systems with mechanical components.
Functional Testing Preparation: Establishing testing frameworks to validate geometric transformation capabilities and modular assembly functions.
Conclusion: The successful completion of Stage I in our DNA-inspired self-reproducing robot research represents a significant milestone in autonomous systems development. By establishing robust geometric transformation principles and fundamental design concepts, we have laid the groundwork for advancing toward truly autonomous self-replicating robotic systems. Currently in Stage II, we are actively translating theoretical concepts into physical prototypes. The development of 3D models and integration planning for electronic components and hardware systems marks substantial progress toward creating functional self-reproducing robotic systems. This prototype development stage will enable experimental verification and performance assessment of our conceptual framework.