Research Achievement: Inspired by African elephant foraging behavior, researchers developed an intelligent granular manipulation strategy that achieves 100% success rate with 50% time savings. This work was published in Advanced Intelligent Systems (JCR Q1, IF = 7.298).
Introduction
Manipulating granular materials is a critical capability for robotic grippers. However, existing manipulation strategies often suffer from inefficiency when handling large quantities of dispersed granules. To address this challenge, this study draws inspiration from the foraging behavior of African elephants and proposes an intelligent strategy for manipulating loose granular materials.
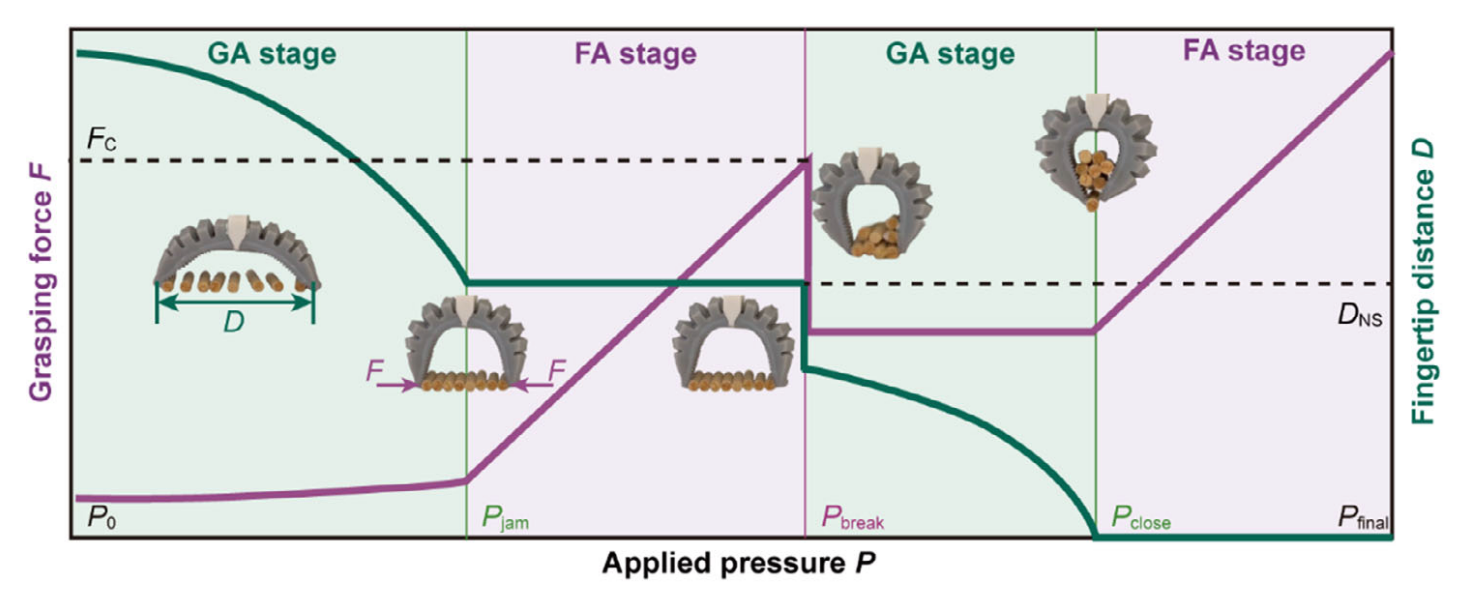
The difficulty of manipulating granular materials is closely tied to their intrinsic physical characteristics. Unlike individual particles, granule ensembles exhibit properties of both solids and fluids. Without external constraints, they behave like fluids, while under geometric or force confinement, they exhibit solid-like properties. Furthermore, they can transition between these two phases, which poses a significant challenge for existing robotic transport technologies.
Bio-Inspired Strategy
To tackle this issue, the research team turned to the African elephant. As a voracious feeder, an elephant consumes up to 200 kg of food per day. Among this intake, granular food (such as elephant grass, peanuts, and pellets) accounts for approximately 10%, estimated to comprise around 69,000 granules.
If the elephant were to pick up each granule individually (assuming each pickup takes 2 seconds), it would require at least 38 hours. However, the team observed an efficient transfer strategy used by elephants to meet this demand:
Elephant Manipulation Strategy
- Gathering Phase: The elephant gathers dispersed granules using the tip of its trunk
- Compression Phase: The two "fingers" at the trunk's tip pinch and compress the clustered granules from both sides
- Transport Phase: The trunk retracts while maintaining the compressed granule cluster
During this grasping process, the granules undergo multiple transitions between fluid-like and solid-like states under the influence of the trunk. This strategy creates a physical context that adapts dynamically to the nature of the granules, enabling the elephant to capture more material in each action and potentially improve intake efficiency.
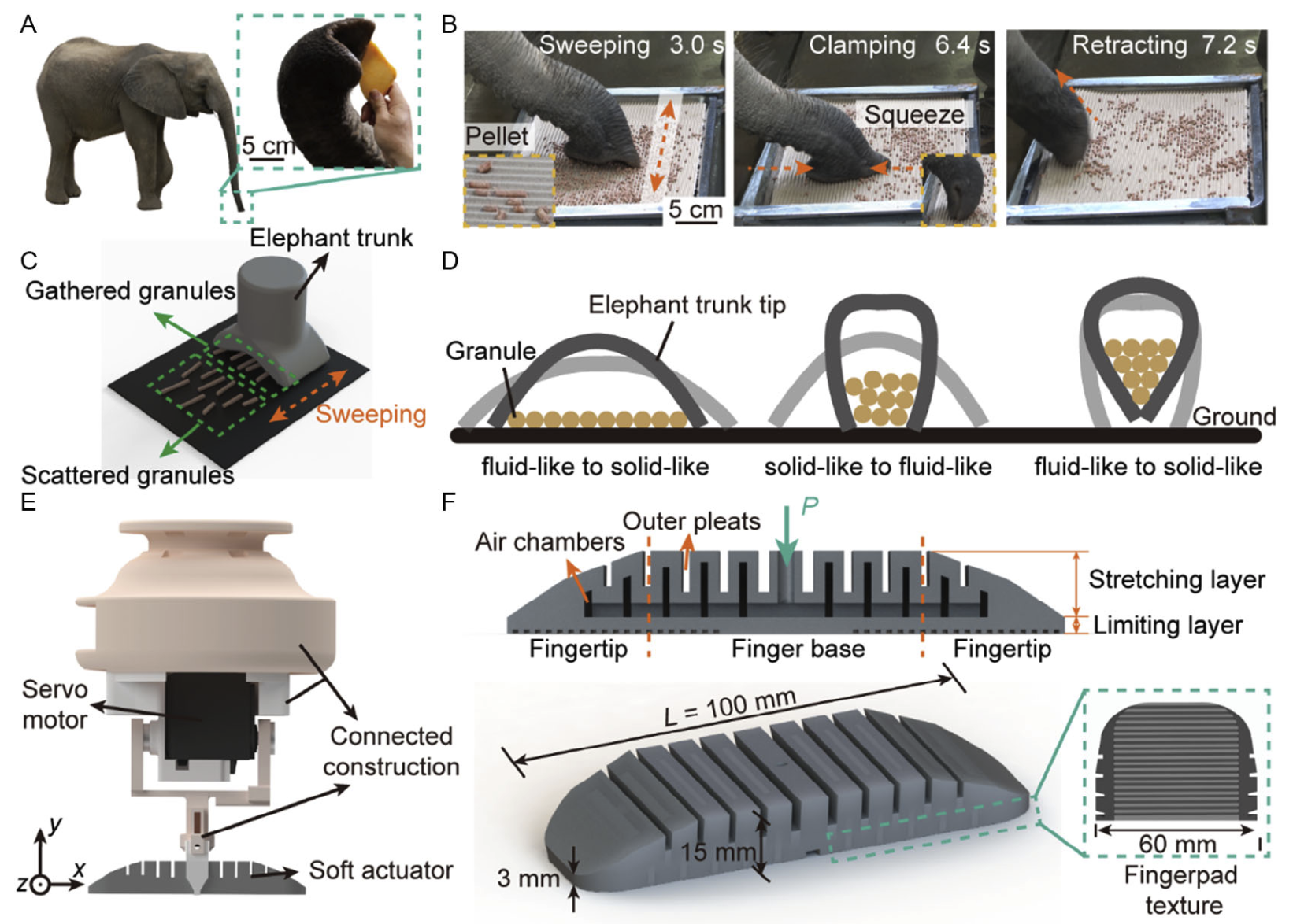
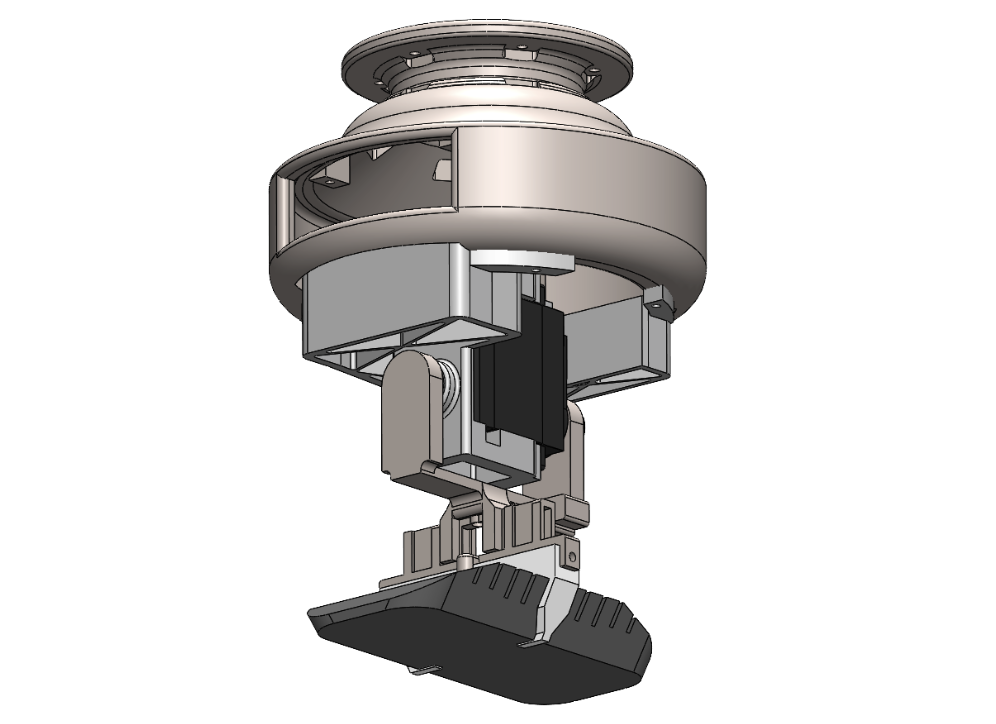
Pneumatic Soft Gripper Design
Inspired by this bio-informed strategy, the researchers developed a pneumatic soft gripper that utilizes both force-driven and geometry-driven modes to repeatedly induce solid–fluid phase transitions in dispersed granules before completing the grasp.
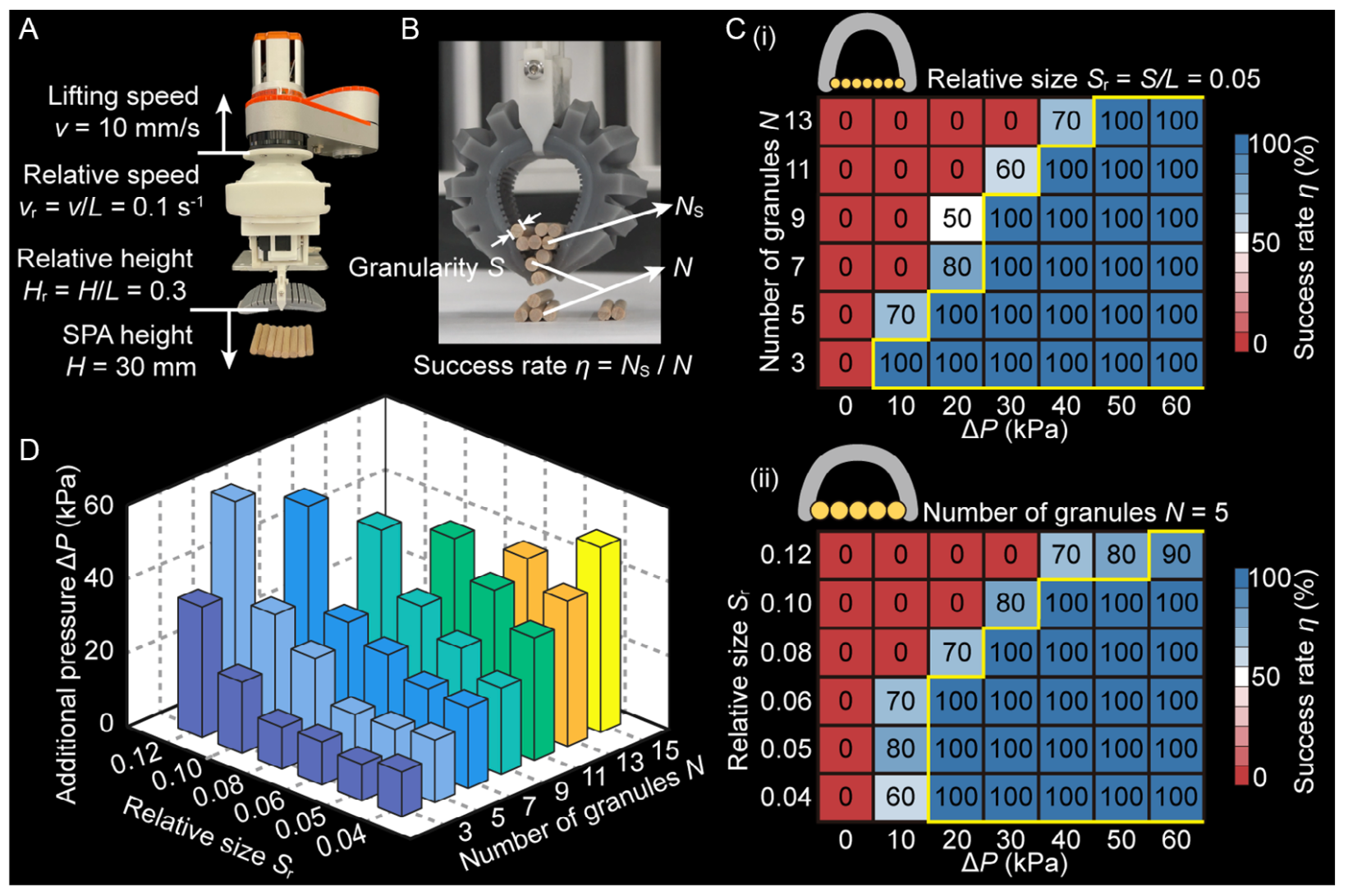
Pressure Optimization
To achieve successful grasping, the soft gripper must generate sufficient horizontal force, which is dependent on the supplied air pressure. Experimental results showed that increased pressure led to higher success rates. However, excessive pressure introduces two problems:
- Increased energy consumption
- Risk of structural rupture in the soft gripper
To balance performance and safety, the team established a minimum pressure database based on achieving a 90% success rate. By inputting the relative size and number of target granules, the corresponding pressure can be selected from the database, enabling the gripper to handle granules of varying sizes and quantities.
Performance Evaluation
To further evaluate the performance of this elephant-trunk-inspired strategy, the team constructed a test scenario for grasping dispersed granules. Experimental results showed that compared to traditional one-by-one grasping strategies, this biologically inspired approach achieved remarkable performance improvements.
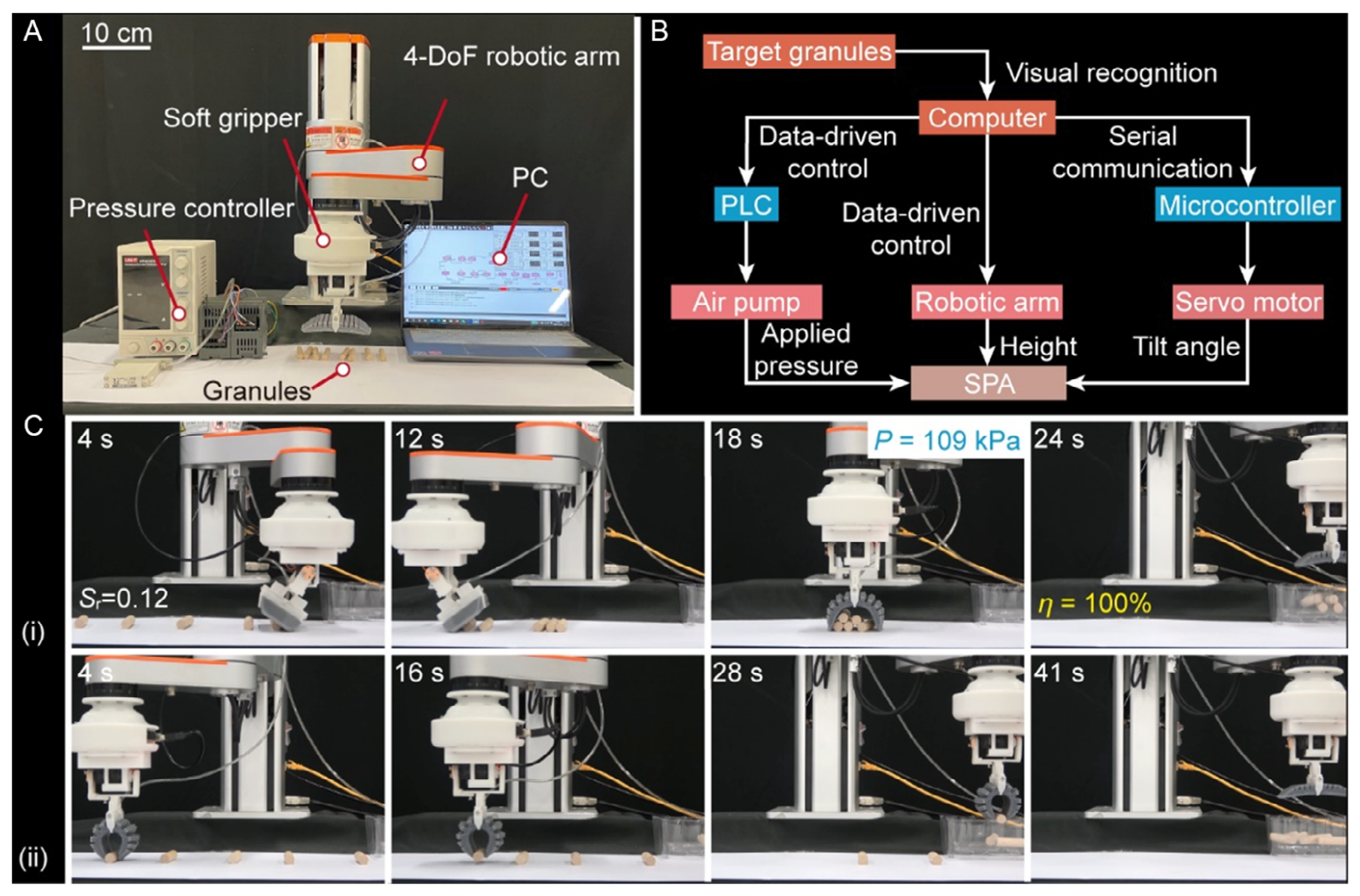
Industrial Applications
Finally, this intelligent manipulation strategy was applied in the food industry, where it was integrated with image recognition technology to enable the efficient transport of granular food items with different sizes and quantities.

Key Applications
- Food Processing: Automated handling of grains, nuts, and pellets
- Pharmaceutical Industry: Manipulation of tablet and capsule production
- Manufacturing: Assembly of small cylindrical components
- Logistics: Sorting and packaging of granular materials
Innovation Impact: This research demonstrates how biological inspiration can lead to breakthrough solutions in robotics, achieving both improved efficiency and reduced energy consumption through intelligent manipulation strategies.
Future Directions
The success of this elephant-trunk-inspired approach opens new possibilities for:
- Advanced granular material handling in industrial automation
- Adaptive gripper designs for varying granule sizes and shapes
- Integration with machine learning for real-time optimization
- Extension to other bio-inspired manipulation strategies
This research represents a significant advancement in bio-inspired robotics, demonstrating how careful observation of natural systems can lead to innovative engineering solutions that outperform traditional approaches.