
Quadruped Spider Robot Design and Gait Optimization
Bio-inspired quadruped robot with advanced locomotion capabilities, multiple gait patterns, and dynamic stability control for various terrain adaptations.
Read Full ProjectI am Sylvester Zhang (Siyuan Zhang), a passionate robotics enthusiast and currently a master's student in Mechanical Engineering at Columbia University at Creative Machine Lab, advised by Prof. Hod Lipson. With my bachelor's degree in Aeronautical and Astronautical Engineering from Sun Yat-sen University, I advance robotics through innovation and creativity.
My focus spans soft robotics, rehabilitation robot, self-reproducing robot, mechanical and computational design, robot material, and bio-inspired system. By blending advanced modeling, simulation, learning, and optimization, I engineer life-like machines that sense, adapt, and evolve alongside people. My ultimate goal is to craft human-centered robotic system that feel unmistakably alive—machines with a perceptible breath, heartbeat, and responsive presence—so that technology and humanity may flourish together and shape a better world!
I'm always excited to discuss research collaborations, project opportunities, or share insights about robotics and engineering innovations.
You can reach me directly at: sz3297 at columbia [dot] edu

Manuscript in Preparation
Self-reproduction is central to biological life yet remains unrealized in physical robots. We introduce a modular system that reproduces through a geometry-guided 2D–3D–2D cycle, where identical triangular modules autonomously attach, fold, and reorganize via magnetic coupling. A 2-module body reproduces with 33% success, while 6- and 8-module worms reach 100%. Offspring also exhibit early differentiation as identical units diverge through pathway-dependent transitions. These results show that simple geometric and mechanical principles can enable embodied self-reproduction, laying groundwork for scalable, evolution-capable robotic lineages.
Manuscript in Preparation
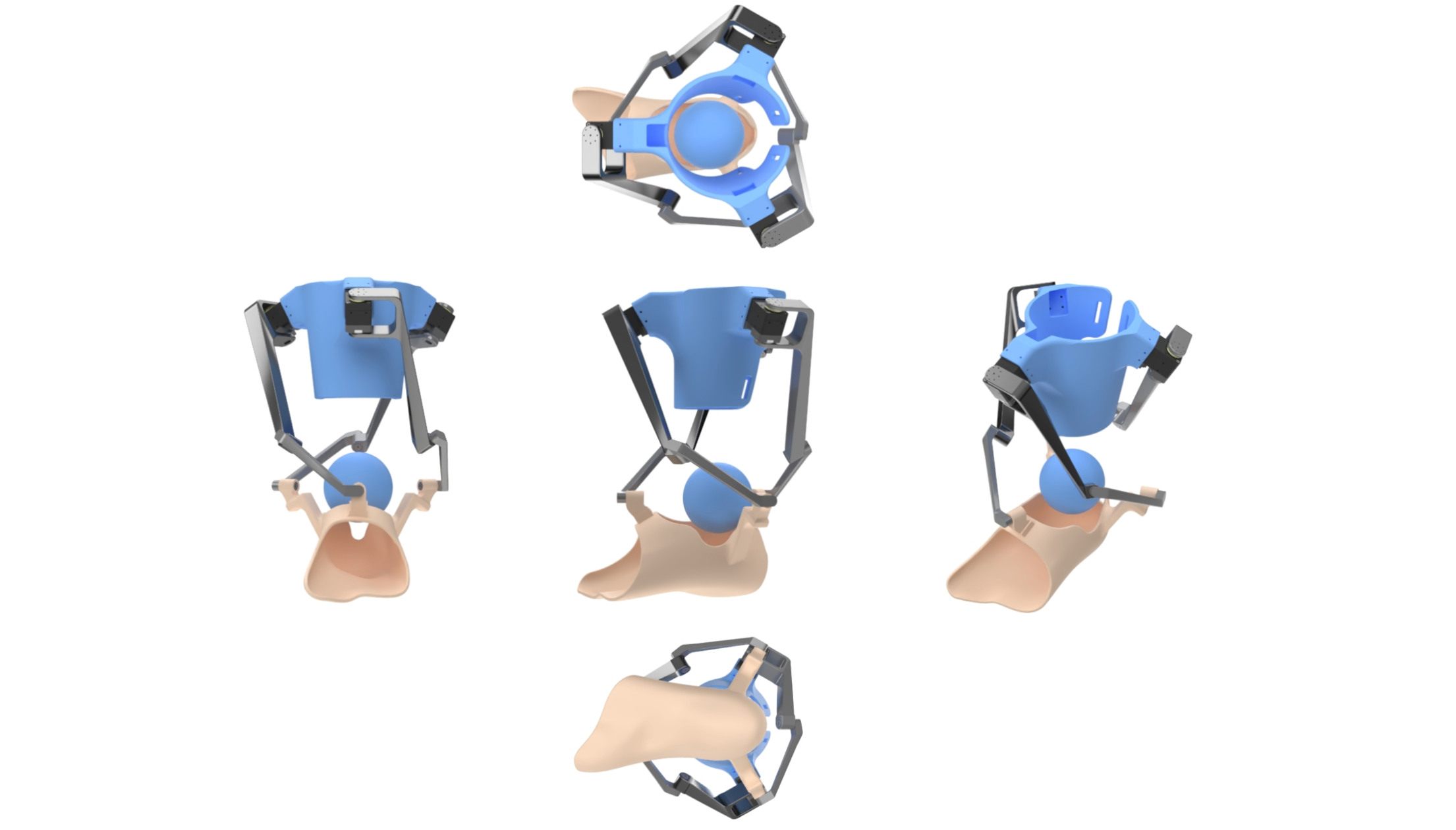
This paper presents the development of a wearable ankle rehabilitation robot based on a 3-RRR spherical parallel mechanism to support multi-DOF recovery. A complete design-to-dynamics pipeline has been implemented, including structural design, kinematic modeling, and Lagrangian-based dynamic modeling for torque estimation.

IEEE Transactions on Robotics, Vol. 41, pp. 3890-3907
A novel multimodal gripper integrating four operating modes into a compact structure with competitive grasping diversity across weight (0.2g to 10kg), fragility, size, and shape aspects for diverse applications.
Advanced Engineering Materials, Vol. 26, Issue 18, pp. 2400461
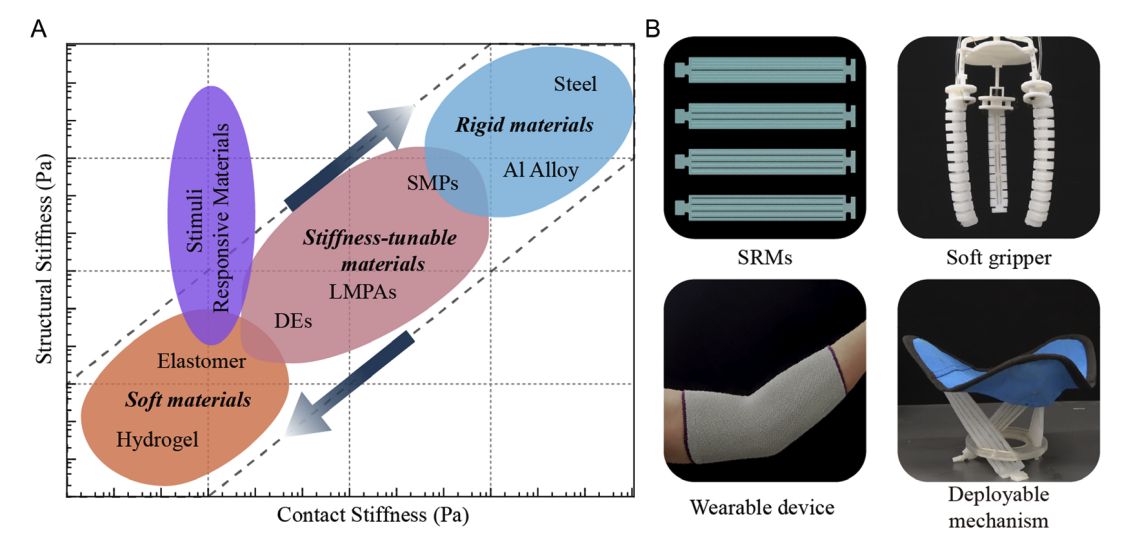
A novel soft stimuli-responsive material combining shape memory alloy into compliant materials, achieving flexural modulus increases from 6.6 to 142.4 MPa while maintaining low contact stiffness for compliant interaction.
Advanced Intelligent Systems, Vol. 5, Issue 10, pp. 2300182
Bio-inspired intelligent strategy integrated into a soft pneumatic gripper for transporting dispersed granules, achieving over 90% success rate and ~50% time savings compared to individual gripping methods.
Bio-inspired quadruped robot with advanced locomotion capabilities, multiple gait patterns, and dynamic stability control for various terrain adaptations.
Read Full Project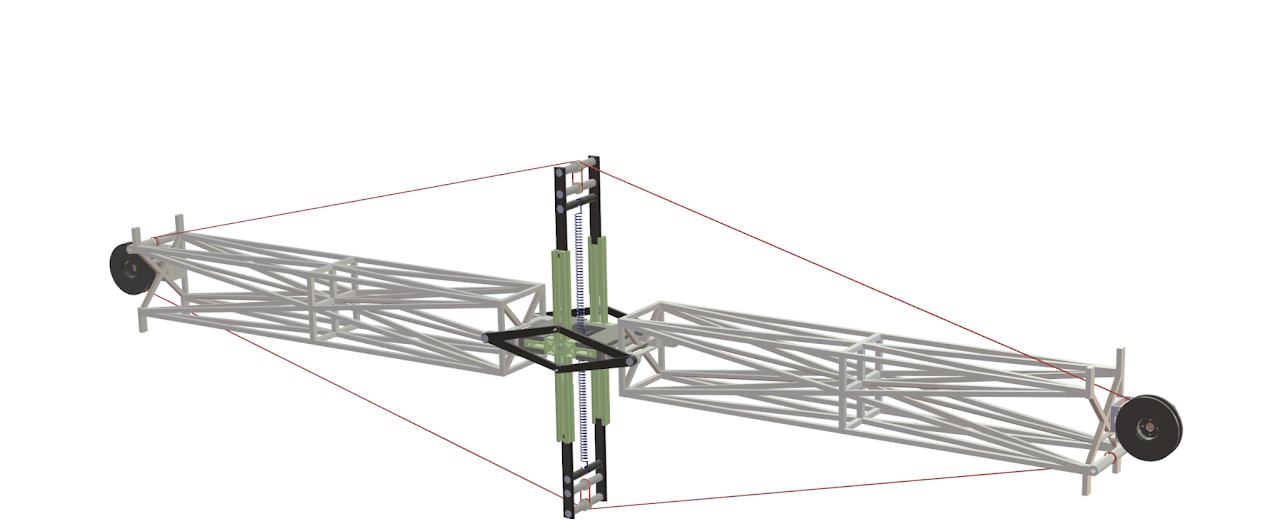
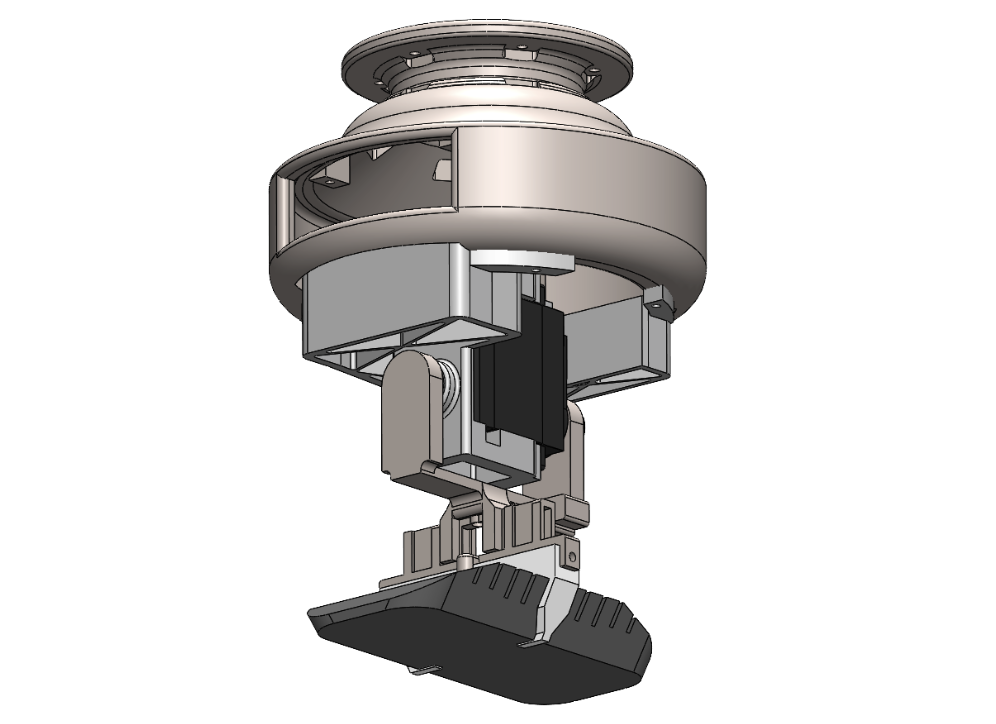
Developed a lever arm amplification joint to improve torque output for tendon-driven robotic arms in space applications. Optimized lightweight components and conducted kinematic analysis for precise control at Sun Yat-sen University.
Read Full Project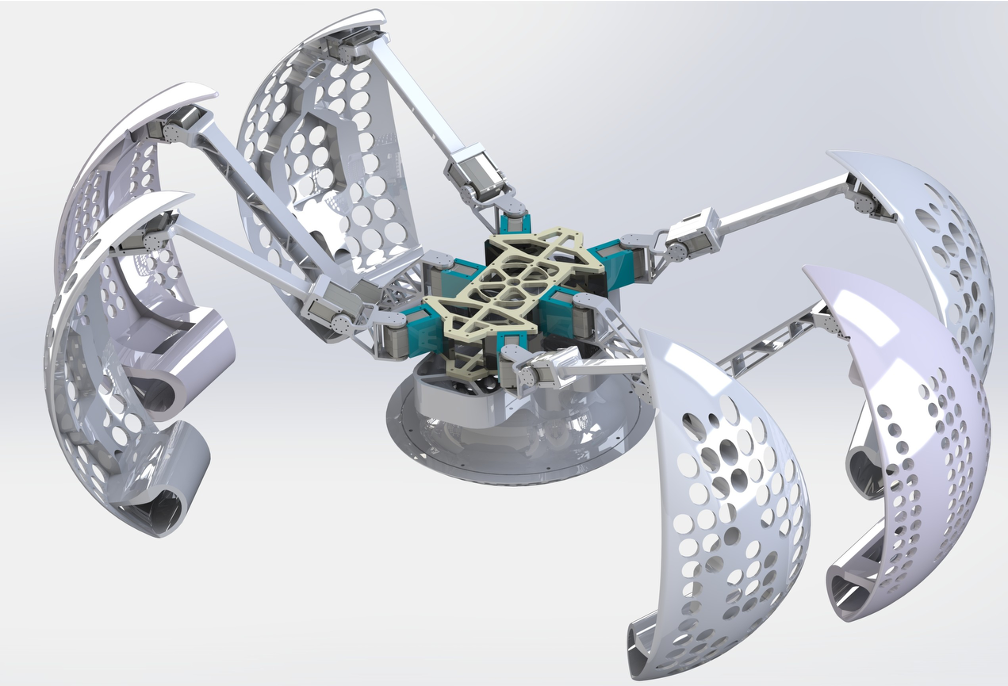
Versatile spherical robot for planetary exploration with multiple locomotion modes, autonomous navigation, and environmental sensing.
Read Full Project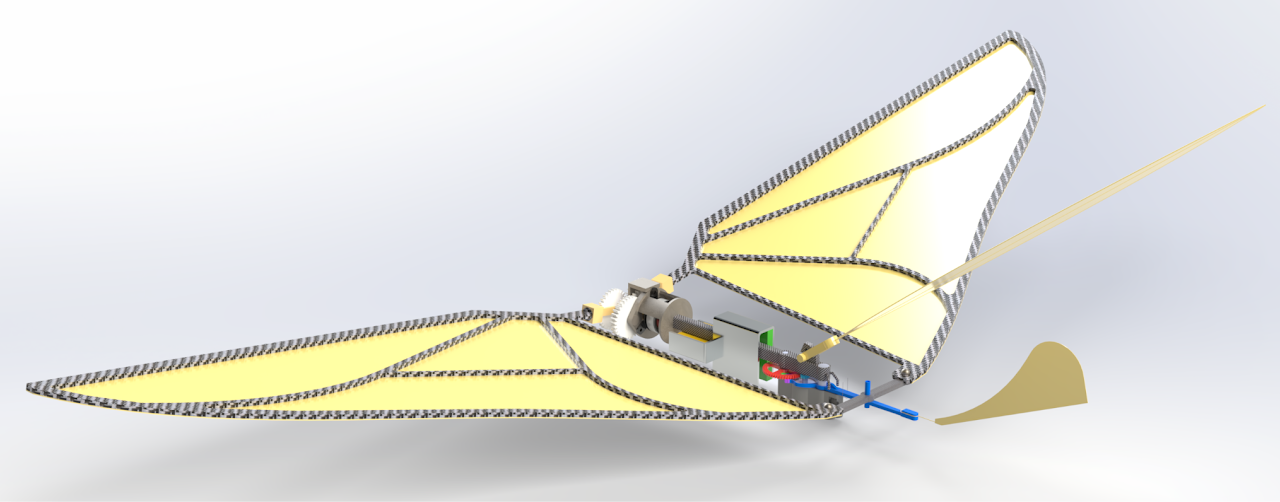
Bio-inspired flapping-wing robot mimicking avian flight mechanics with flexible wing structures and intelligent flight control systems.
Read Full Project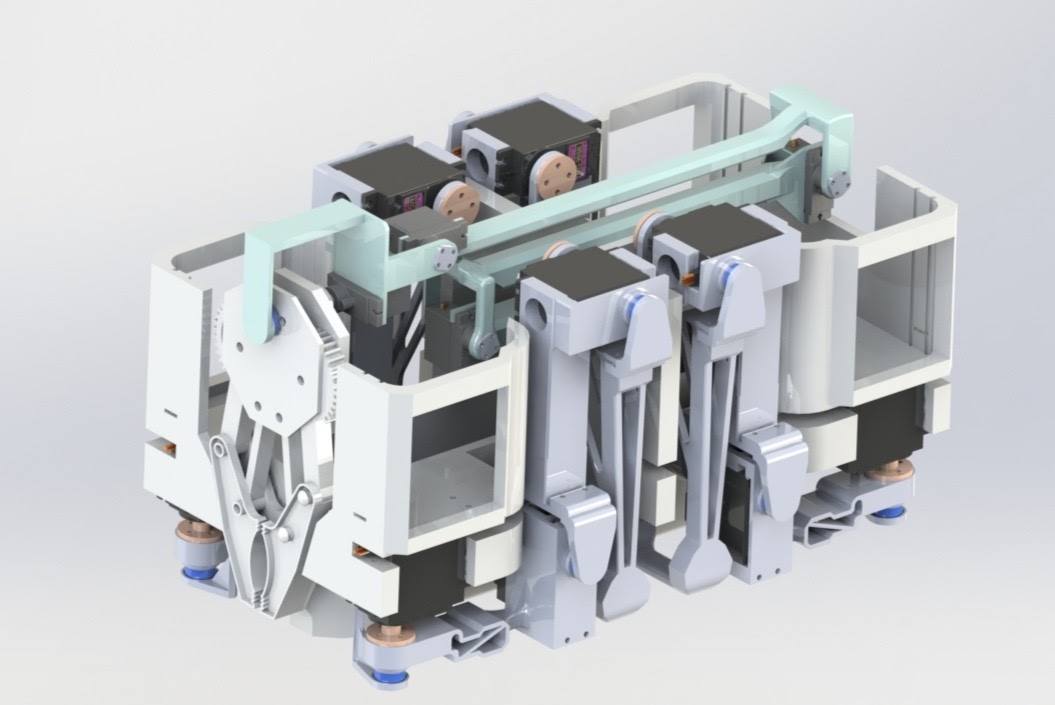
Compact foldable CubeSat robot with adhesive crawling capabilities for external space station operations and satellite servicing.
Read Full ProjectTeaching Assistant for Robotics Studio by Prof. Hod Lipson for 2025 Spring semester. Supporting 30+ students across undergraduate and graduate levels in hands-on robotics projects.
Conducted requirements analysis and structural design for consumer electronics products. Participated in R&D projects for camera accessories including thermal management and protective components.













